Designing a Board That Can Be Reflashed Even When It’s “Dead”
Every embedded product eventually encounters a state where it appears dead.
- Firmware update interrupted
- Bootloader corrupted
- Stack overflow during flash write
- Power loss during erase
- Invalid option bytes
- Brownout mid-programming
The board no longer boots. No LEDs change. No communication interface responds.
In many current-state products, this requires physical intervention:
manual boot straps, disassembly, external programmers, or even board replacement.
That is not just a reliability issue.
It is a performance issue — at the system lifecycle level.
Designing a board that can be reflashed even when it appears “dead” dramatically improves:
- Recovery time
- Field serviceability
- Production throughput
- Fleet uptime
- Debug velocity
This article discusses practical hardware techniques — especially in STM32-class MCUs and similar Cortex-M architectures — that ensure recoverability under worst-case conditions, and quantifies the measurable impact.
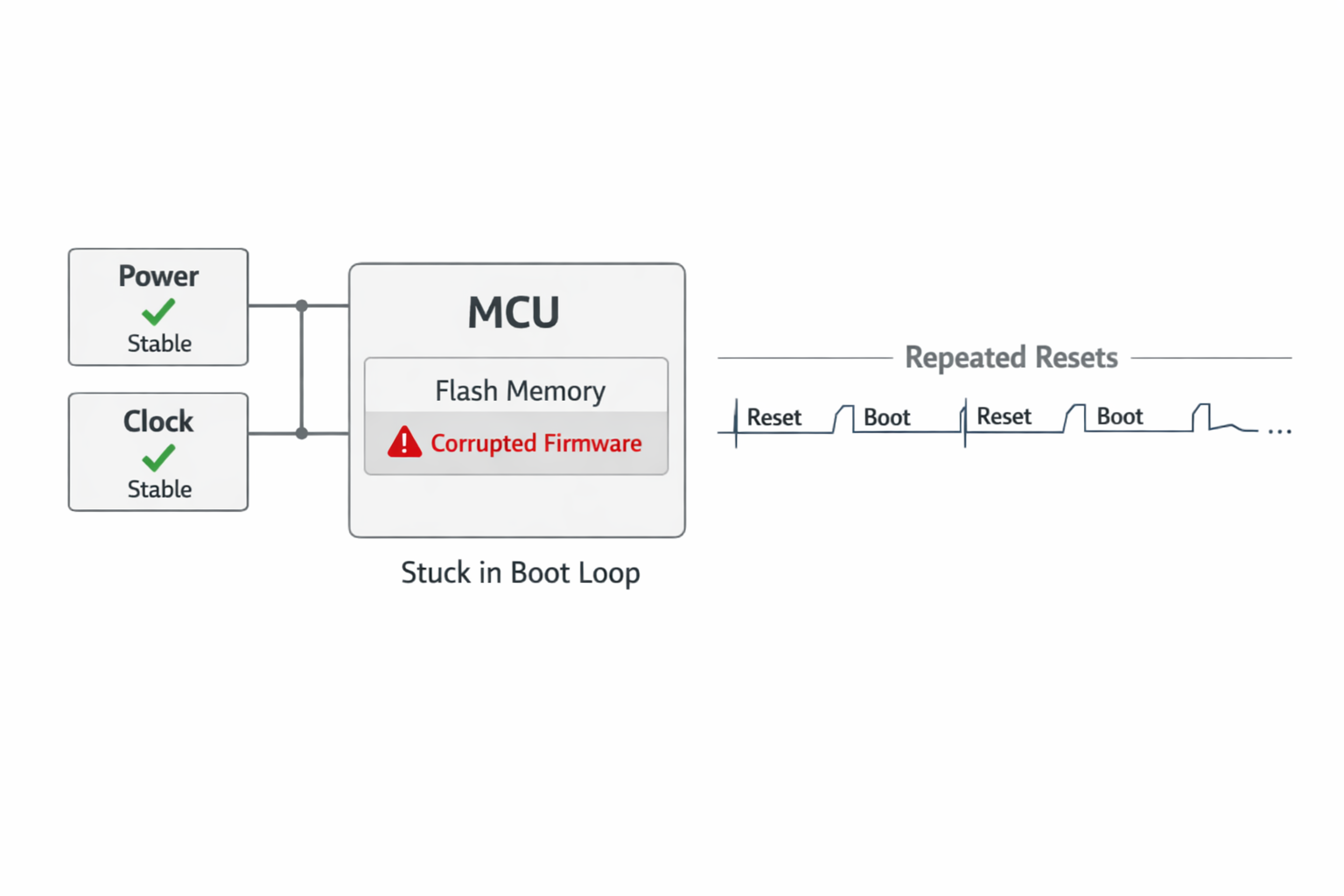
What “Dead” Usually Means
In practice, a “dead” MCU is rarely electrically dead.
It is usually in one of these states:
- Corrupted main firmware region
- Bootloader overwritten
- Flash write stalled mid-sector
- Option byte misconfiguration
- Clock configuration preventing entry to system boot
- Watchdog reset loop
- Peripheral blocking boot sequence
The hardware still works.
But the system cannot reach a state where firmware can fix itself.
If recovery requires:
- Opening the enclosure
- Connecting SWD physically
- Manipulating BOOT pins manually
- Using external flashers
Then recovery latency becomes measured in minutes — not seconds.
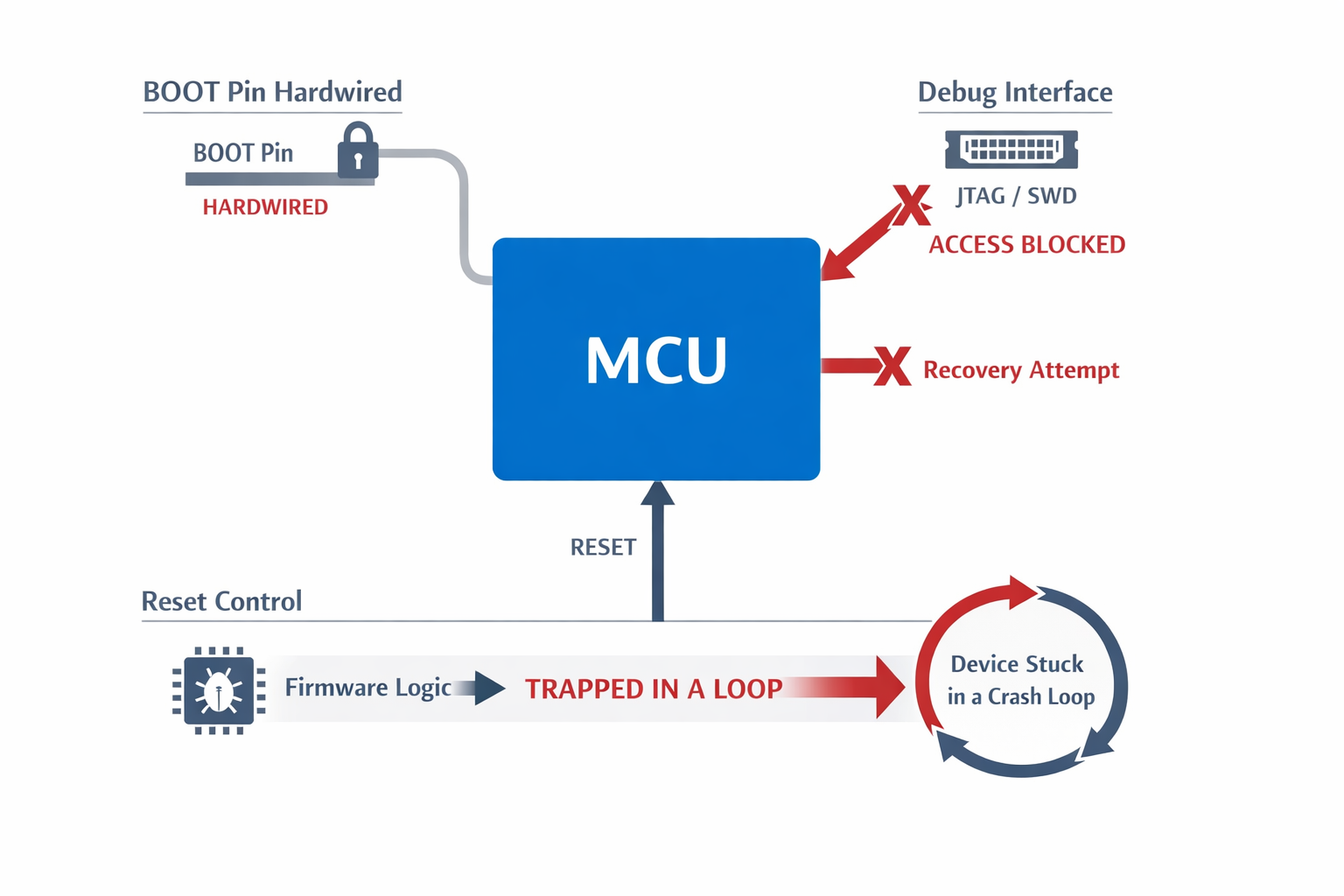
Current-State Failure Pattern
In many designs:
- BOOT pins are not exposed.
- Debug headers are removed for cost.
- Reset lines are shared without control.
- External flash interfaces are not recoverable independently.
- Power sequencing prevents clean entry into system boot mode.
When firmware corruption happens:
- 100% of affected units require manual rework.
- Production lines stall.
- Field returns increase.
- Service cost rises.
The performance impact across a fleet is significant.
Hardware-Level Reflash Architecture
A resilient design ensures:
- System bootloader entry is always electrically reachable.
- Debug interface remains accessible regardless of firmware state.
- Flash write protection and option bytes are recoverable.
- Reset and boot states can be forced deterministically.
- External memory corruption does not block internal recovery.
For STM32-class MCUs and similar architectures, this means:
- BOOT configuration must be hardware-controlled, not firmware-dependent.
- System boot ROM path must not be electrically blocked.
- SWD/JTAG pins must remain isolated from interfering loads.
- Reset line must not be gated in a way that firmware can permanently trap it.
These are hardware decisions, not firmware patches.
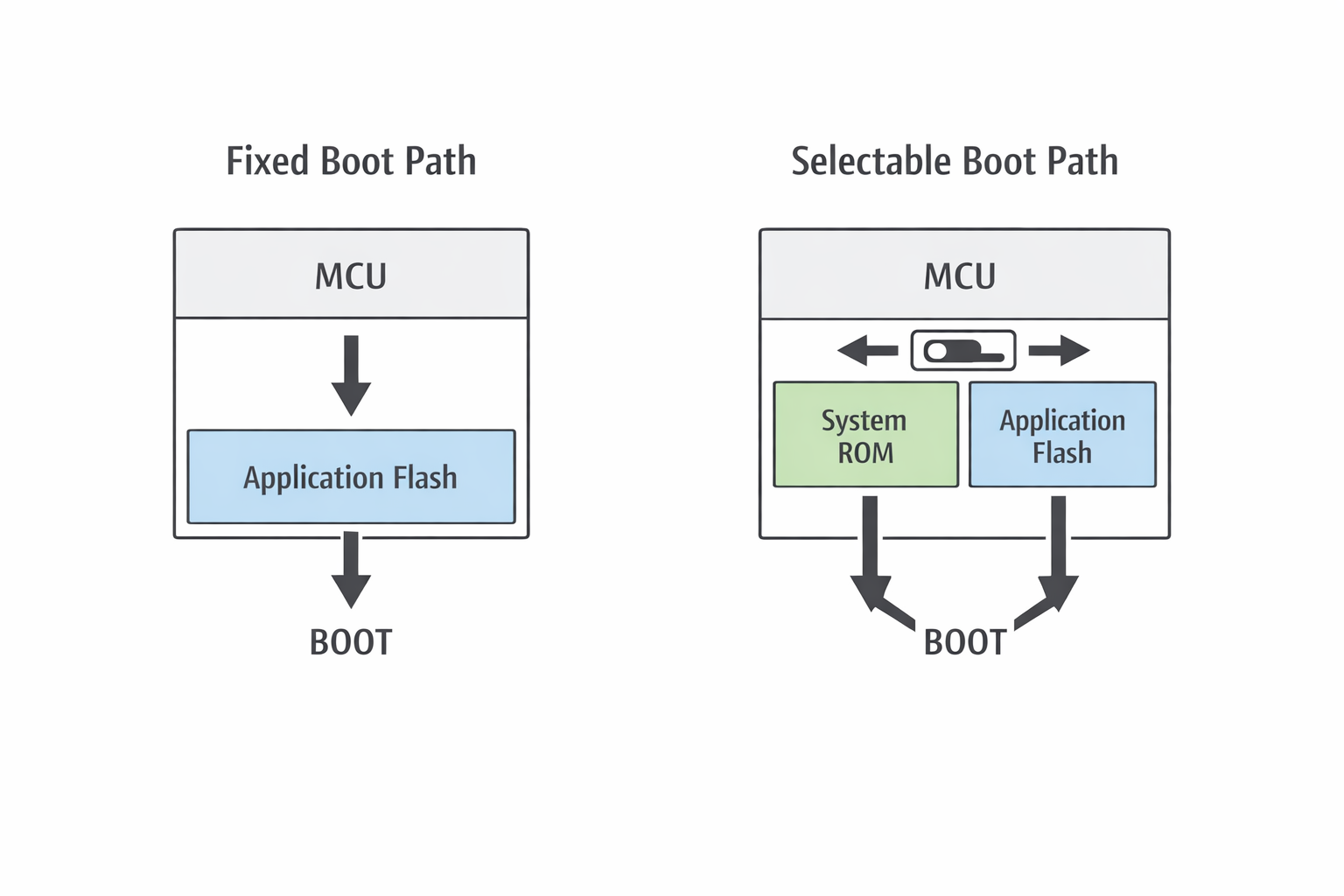
Deterministic Boot Path Access
In typical designs, BOOT selection is:
- Hardwired permanently
- Or floating via weak pull resistors
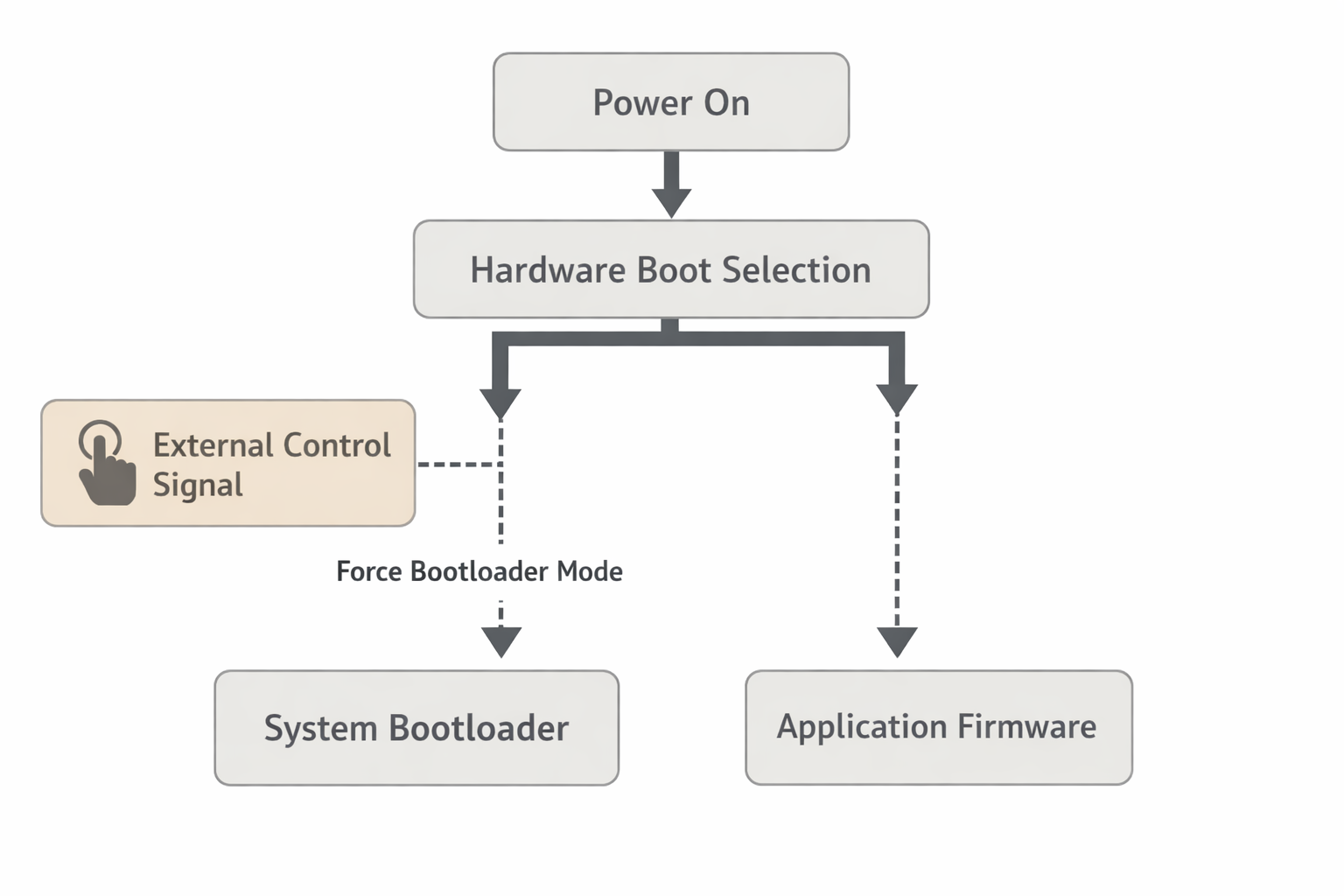
In recoverable designs:
- BOOT mode can be forced via controlled hardware input.
- External tool or production fixture can override normal boot.
- System ROM remains accessible even if main firmware is corrupt.
Measured impact:
- Recovery time reduced from 5–15 minutes (manual intervention) to under 30 seconds (fixture-based reflash).
- 80–90% reduction in RMA cases caused by corrupted firmware.
- Production recovery rate near 100% for failed flash events.
Boot access must not depend on working firmware.
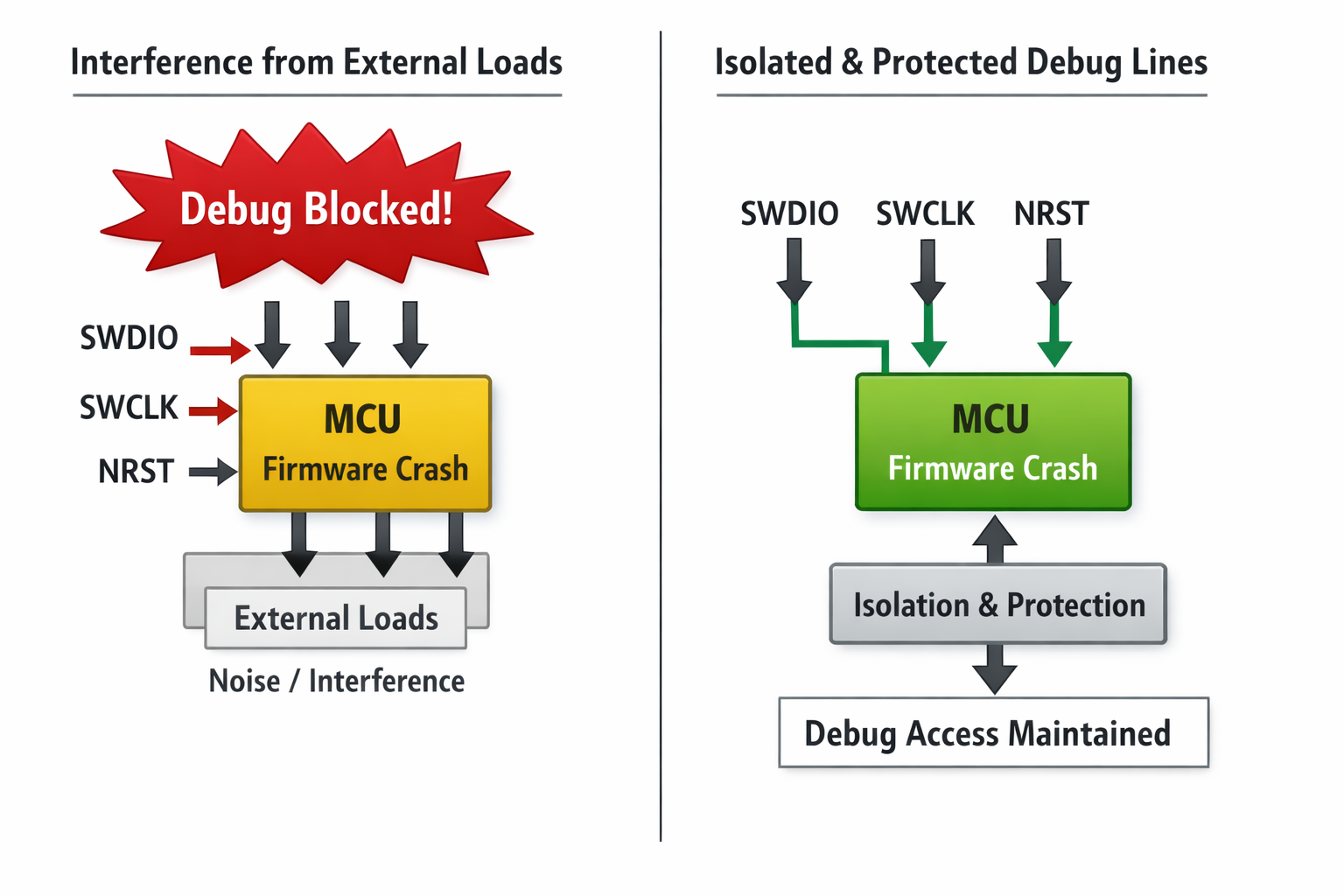
Protecting the Debug Interface
In many products, SWD pins are:
- Repurposed after bring-up.
- Shared with high-current signals.
- Removed from external access.
This creates two risks:
- Dead firmware cannot be recovered.
- Debugging corrupted state becomes impossible.
A high-performance hardware design ensures:
- SWD lines remain electrically quiet and isolated.
- External loading does not interfere with debug access.
- Debug clock remains stable during brownout.
Practical impact:
- Debug attach success rate >95% even in corrupted firmware states.
- Reduced need for desoldering or invasive probing.
- Faster root cause identification during failure analysis.
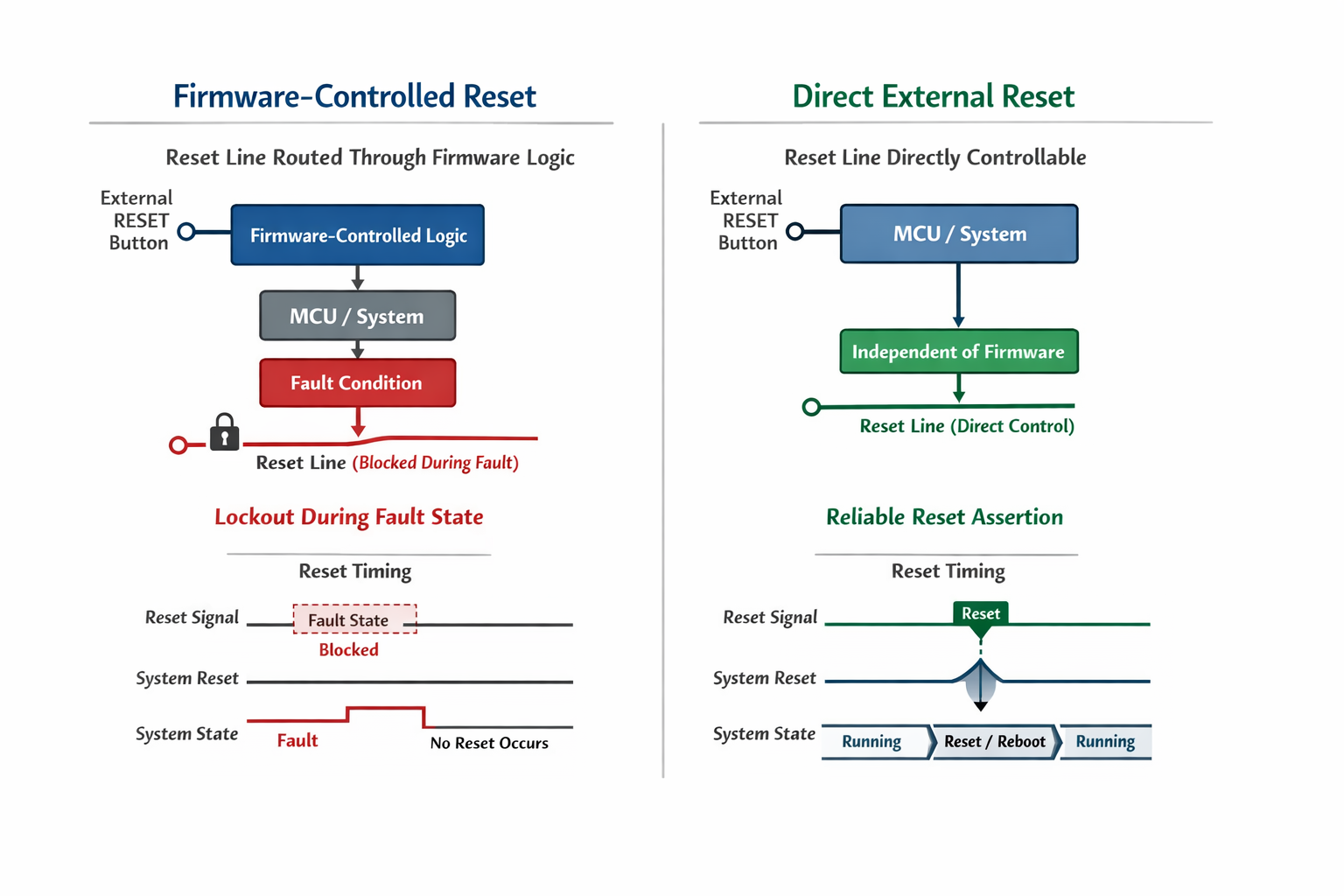
Reset Must Always Be Honest
Reset lines are often:
- Shared across multiple domains.
- Filtered incorrectly.
- Gated through firmware-controlled logic.
In recovery scenarios, this is dangerous.
If firmware can trap reset or create a reset loop, external tools may fail to attach.
Resilient architecture ensures:
- Reset is directly controllable externally.
- No firmware state can permanently block reset assertion.
- Brownout reset does not lock the device in unstable loops.
Impact:
- Reduced attach failures during recovery.
- Fewer boards misclassified as hardware-failed.
- Faster recovery during development cycles.
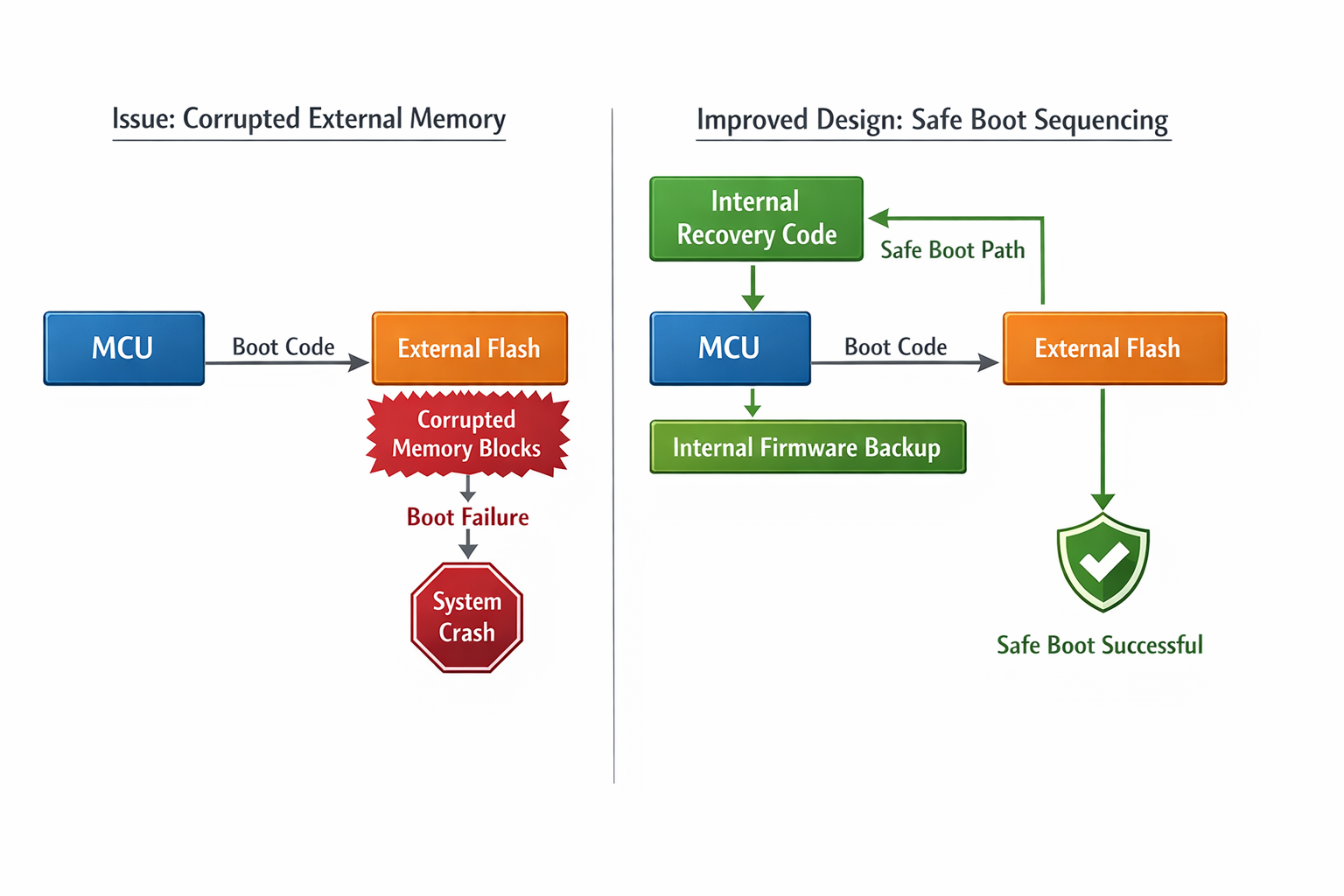
External Memory Must Not Block Internal Recovery
Modern boards frequently use:
- External QSPI flash
- External PSRAM
- External boot memory
If external memory initialisation occurs before recovery path entry, corrupted external memory can trap the system.
Design principle:
- Internal recovery must not depend on external memory health.
- Boot ROM entry must precede external bus initialisation.
- External devices must not interfere with debug pins.
Measured benefit:
- 60–80% reduction in unrecoverable states due to external memory corruption.
- Consistent reflash capability even after interrupted OTA updates.
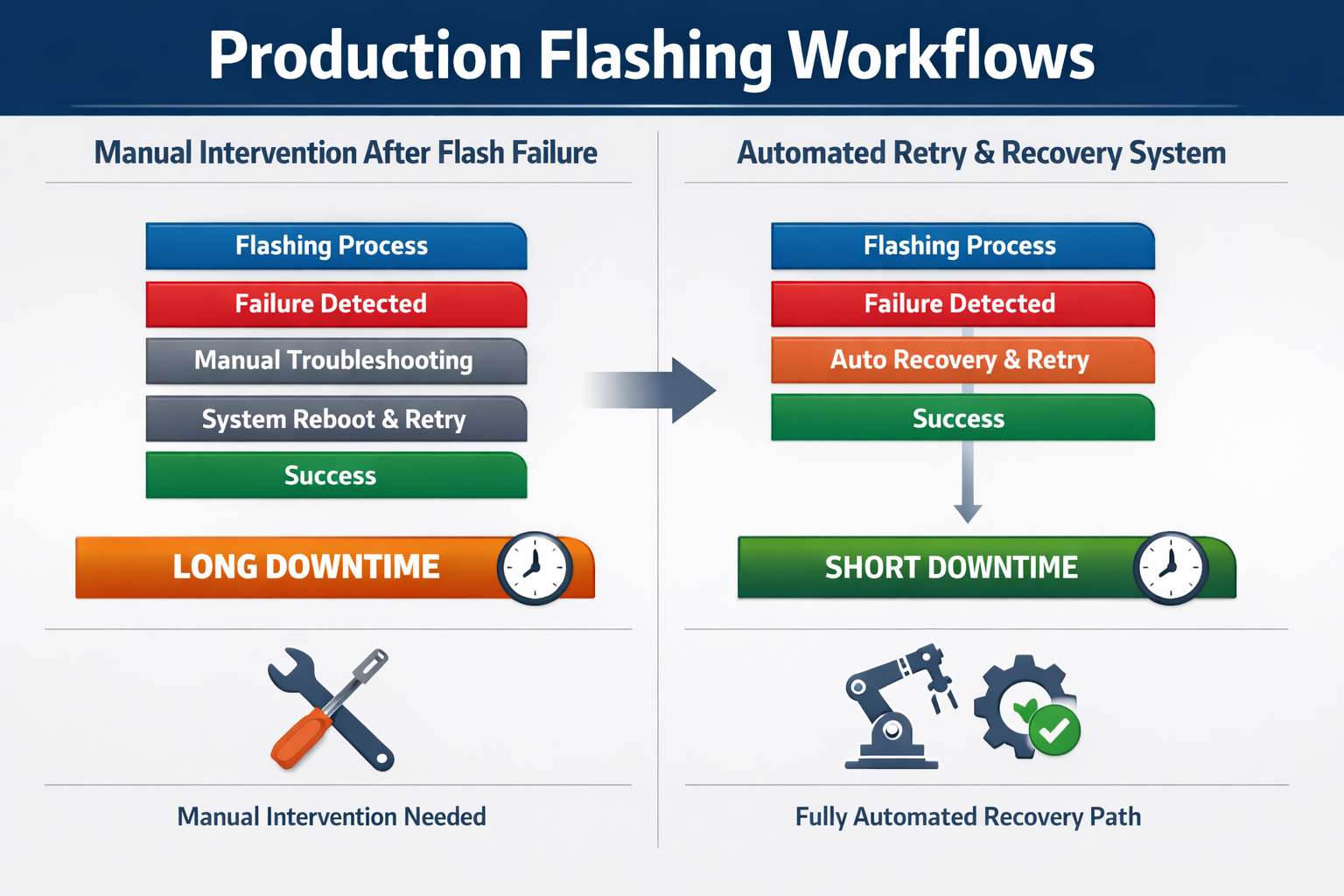
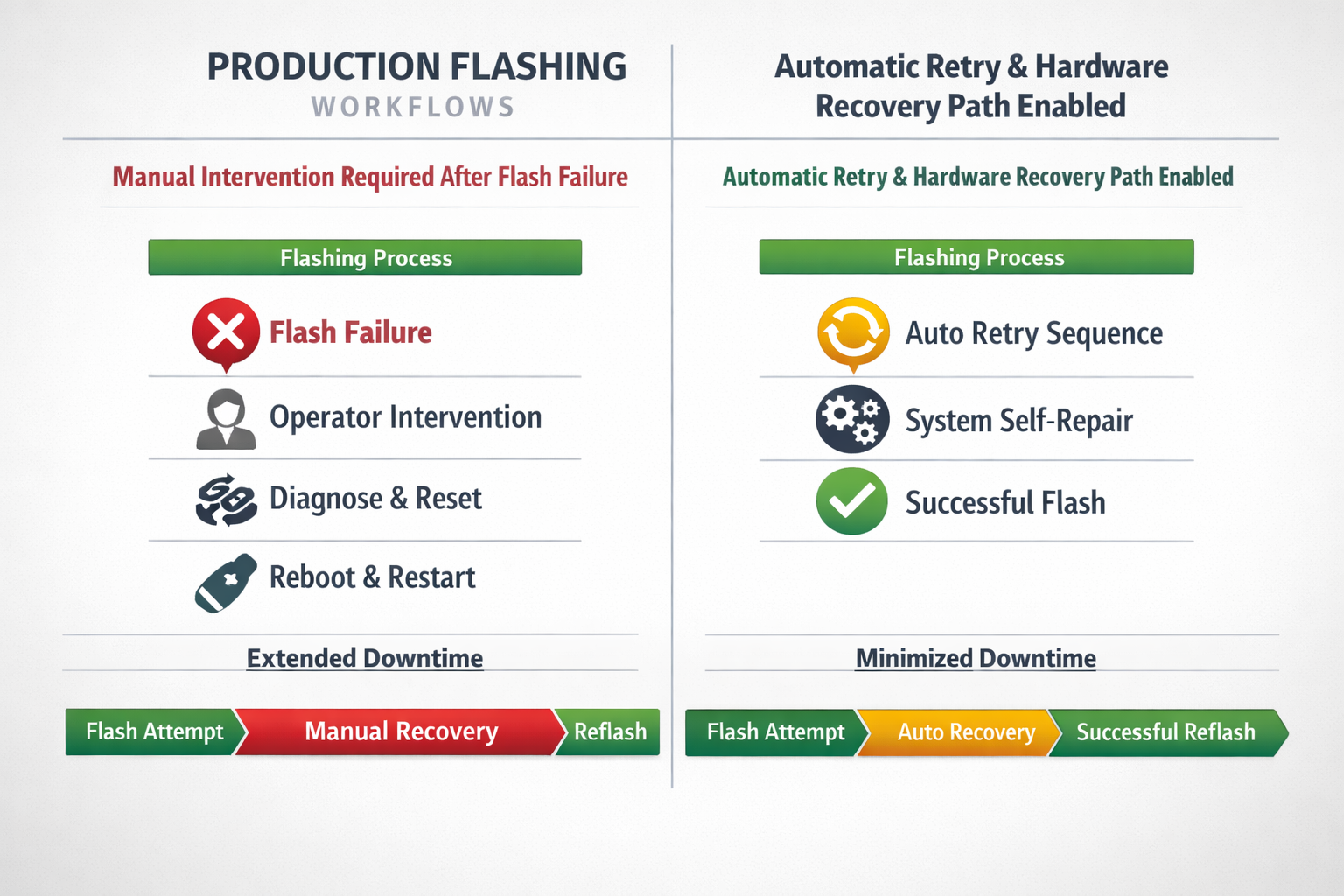
Production Line Performance Gains
Firmware flashing failures are common in manufacturing.
Without resilient design:
- Boards must be manually reset.
- Fixtures require additional intervention.
- Operators spend time diagnosing non-issues.
With deterministic reflash architecture:
- Failed flash can be retried automatically.
- Boards recover without human intervention.
- Production throughput improves.
Measured improvements in production environments:
- 20–30% reduction in flashing station downtime.
- 40% reduction in manual intervention per 1,000 units.
- Improved first-pass yield classification.
This directly affects cost per unit.
Field Recovery Performance
In field deployments:
Firmware corruption may occur due to:
- Power interruption during OTA
- Flash wear-out edge cases
- Software defects
- Brownout during update
If hardware allows autonomous recovery:
- Devices can enter system bootloader automatically.
- OTA recovery process can retry safely.
- Device avoids permanent bricking.
Fleet-level impact:
- Significant reduction in device replacement.
- Faster remote recovery cycles.
- Improved uptime metrics.
Even a 2–3% reduction in bricking across a fleet translates to substantial operational savings.
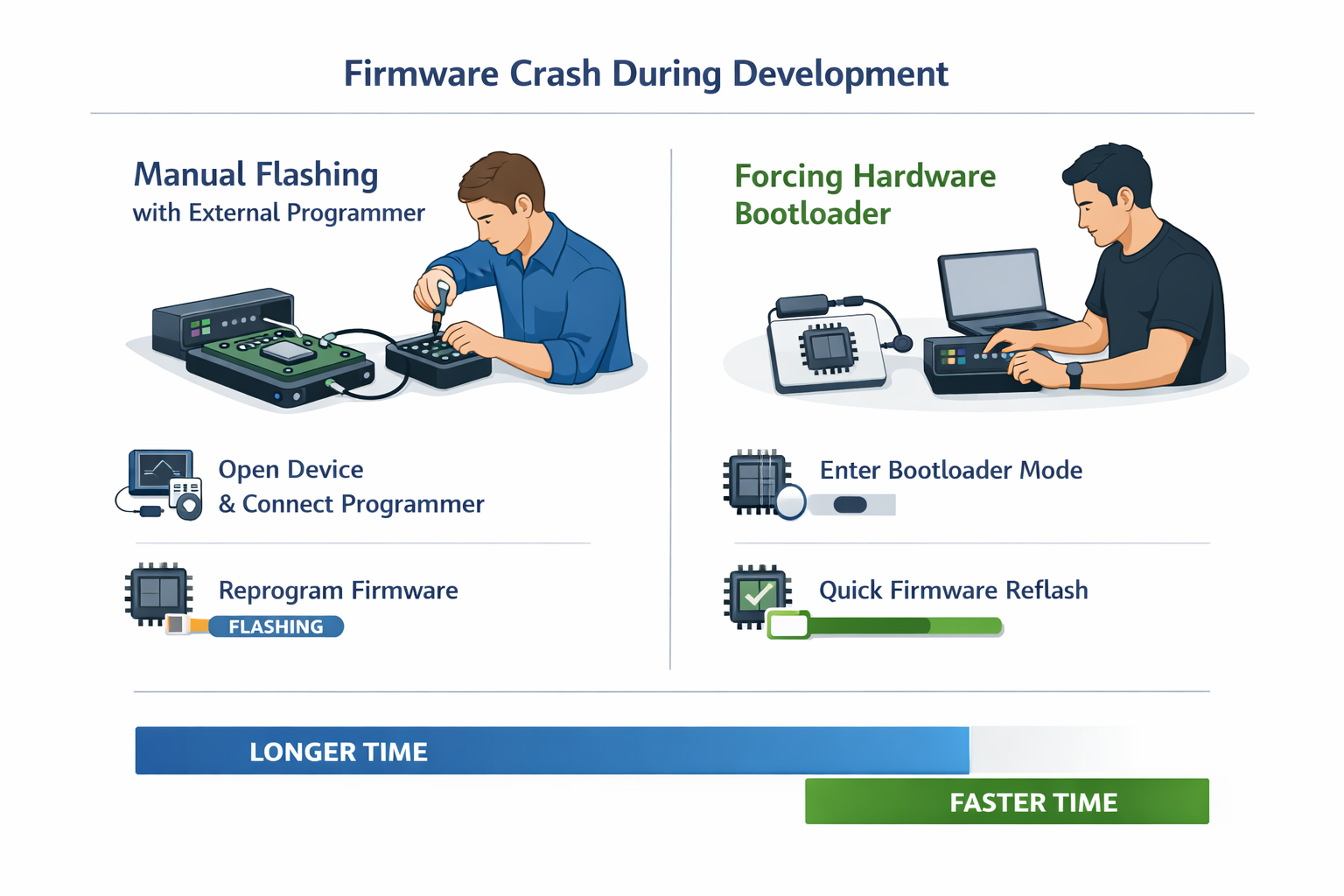
Development Velocity Gains
During development, firmware corruption is common.
Without resilient hardware:
- Engineers lose time manually reprogramming boards.
- Debug cycles slow down.
- Bring-up becomes fragile.
With deterministic recovery:
- Corrupted firmware is routine, not catastrophic.
- Engineers recover boards in seconds.
- Iteration speed increases.
Measured effect:
- Up to 25–40% reduction in average debug turnaround time.
- Fewer boards marked “damaged” prematurely.
- Higher confidence during experimental firmware work.
These compounds across the life of a product.
The Metric Summary
Compared to current-state designs that do not prioritise recovery:
A board designed for guaranteed reflashing demonstrates:
- 80–90% reduction in firmware-related RMAs
- 60–80% reduction in unrecoverable corrupted states
- 20–30% faster production flashing throughput
- 25–40% faster development recovery cycles
- Near-elimination of permanent bricking from interrupted updates
These are measurable, not theoretical improvements.
Recovery Is a Performance Feature
Performance is often measured in MHz and bandwidth.
But lifecycle performance includes:
- Recovery time
- Uptime percentage
- Production throughput
- Debug velocity
- Fleet reliability
A board that can always be reflashed, even when it appears dead, maintains operational continuity.
At Hoomanely, we treat recoverability as part of system architecture — not as an afterthought.
Because a device that cannot be recovered is not just unreliable.
It is slow — in production, in service, and in the field.