Keeping High-Speed Interfaces Quiet During Boot
Why Clock Gating and Controlled Pull Strategies Matter More Than You Think
One of the most frustrating problems during embedded hardware bring-up is a system that behaves perfectly after initialisation but randomly fails during power-up. The firmware loads correctly, communication works, and every subsystem appears healthy—until one cold boot out of fifty causes a peripheral to lock up, a camera fails to enumerate, or a high-speed interface starts producing corrupted data.
Many engineers immediately suspect firmware bugs or signal integrity issues, but the real culprit often lies much earlier in the boot sequence.
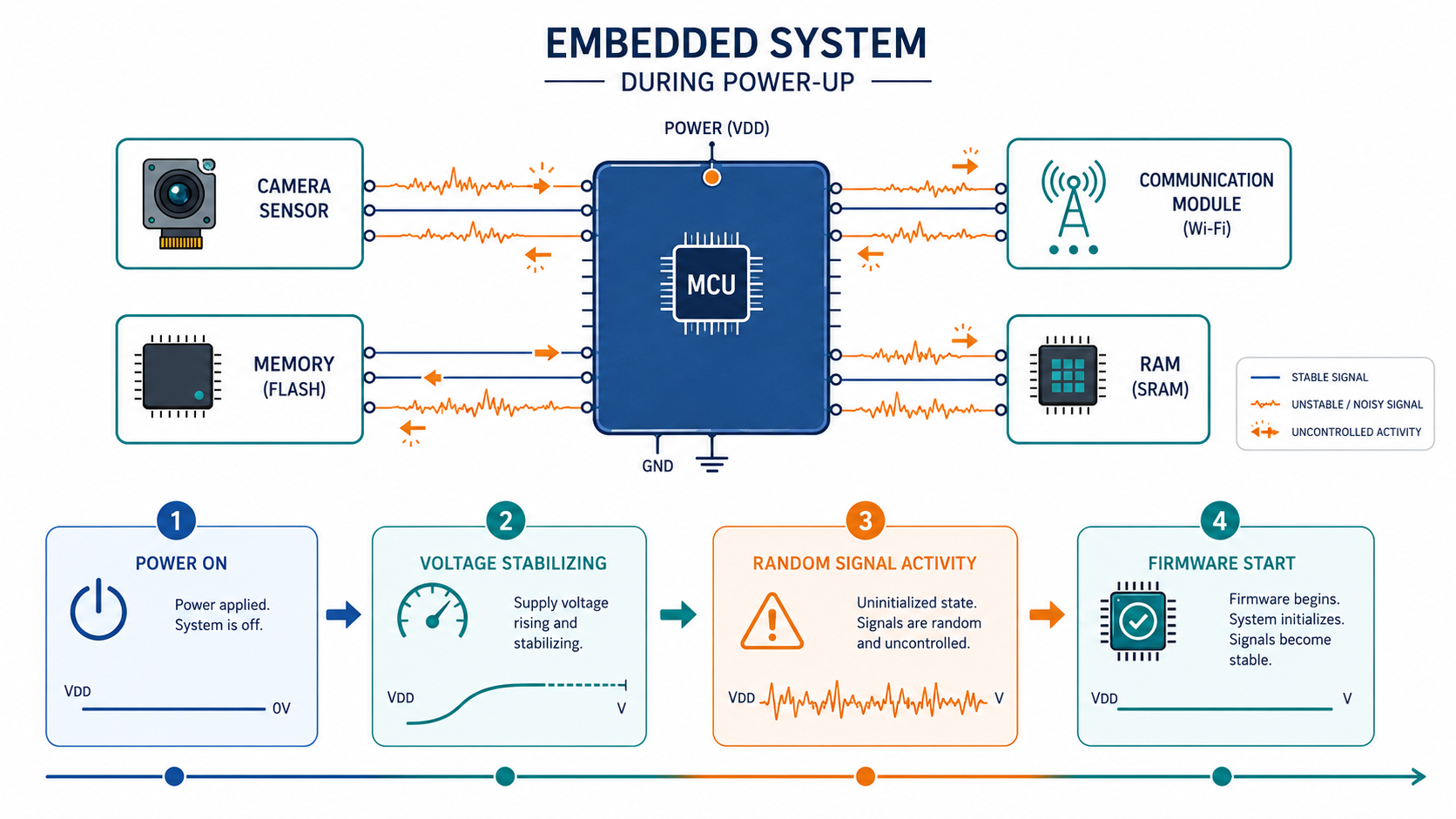
Before the processor executes its first instruction, clocks may already be oscillating, interface pins may be floating, receivers may interpret noise as valid transitions, and multiple devices may compete for ownership of a shared bus. In high-speed digital systems, this brief window—lasting only milliseconds—can determine whether the product starts reliably or enters an unpredictable state.
At Hoomanely, while developing complex multi-sensor embedded platforms like EverBowl, we learned that designing for the boot phase is just as important as designing for normal operation. High-speed interfaces should remain electrically quiet until every participating device is fully powered, properly configured, and intentionally enabled.
The simplest way to achieve this is through clock gating and controlled pull strategies.
Why High-Speed Interfaces Become Noisy During Boot
Modern embedded systems rarely contain just one processor. A single product may include cameras, displays, wireless modules, memory devices, AI accelerators, and multiple microcontrollers communicating simultaneously.
Each subsystem powers up at a different rate.
Some regulators stabilise within microseconds, while others require tens of milliseconds. Crystal oscillators need time to settle. PLLs must lock. Firmware requires initialisation before peripherals become operational.
Unfortunately, signal lines do not wait.
Clock generators may begin oscillating immediately after power is applied. High-speed transmitters may briefly drive outputs before configuration registers are loaded. Floating receivers may detect random transitions caused by power rail ramping or electromagnetic coupling.
The result is unintended communication during a phase when no device is actually ready.
Instead of a clean startup, the interface experiences false clocks, partial packets, invalid synchronisation sequences, and sometimes permanent lockups until the next reset.
The problem becomes increasingly severe as interface speeds increase.
The Hidden Cost of an Ungated Clock
Among all interface signals, the clock line is the most influential.
A receiver can ignore invalid data if no clock is present. But once the clock toggles, every transition is treated as meaningful.
This means an unstable or prematurely enabled clock can force downstream devices into undefined states.
Consider a camera interface connected to an image processor.
If the sensor clock begins oscillating before the sensor's internal analog circuitry is fully powered, the device may interpret random internal states as valid pixel timing. Some sensors recover automatically, while others require a hardware reset before functioning correctly.
Similarly, memory devices may latch incomplete commands, serializers may lose synchronisation, and communication peripherals may enter protocol error states.
Clock activity should therefore be treated as a permission signal rather than a continuously active waveform.
The safest clock is one that remains disabled until the entire subsystem is ready.

Clock Gating: Turning Time On Only When Needed
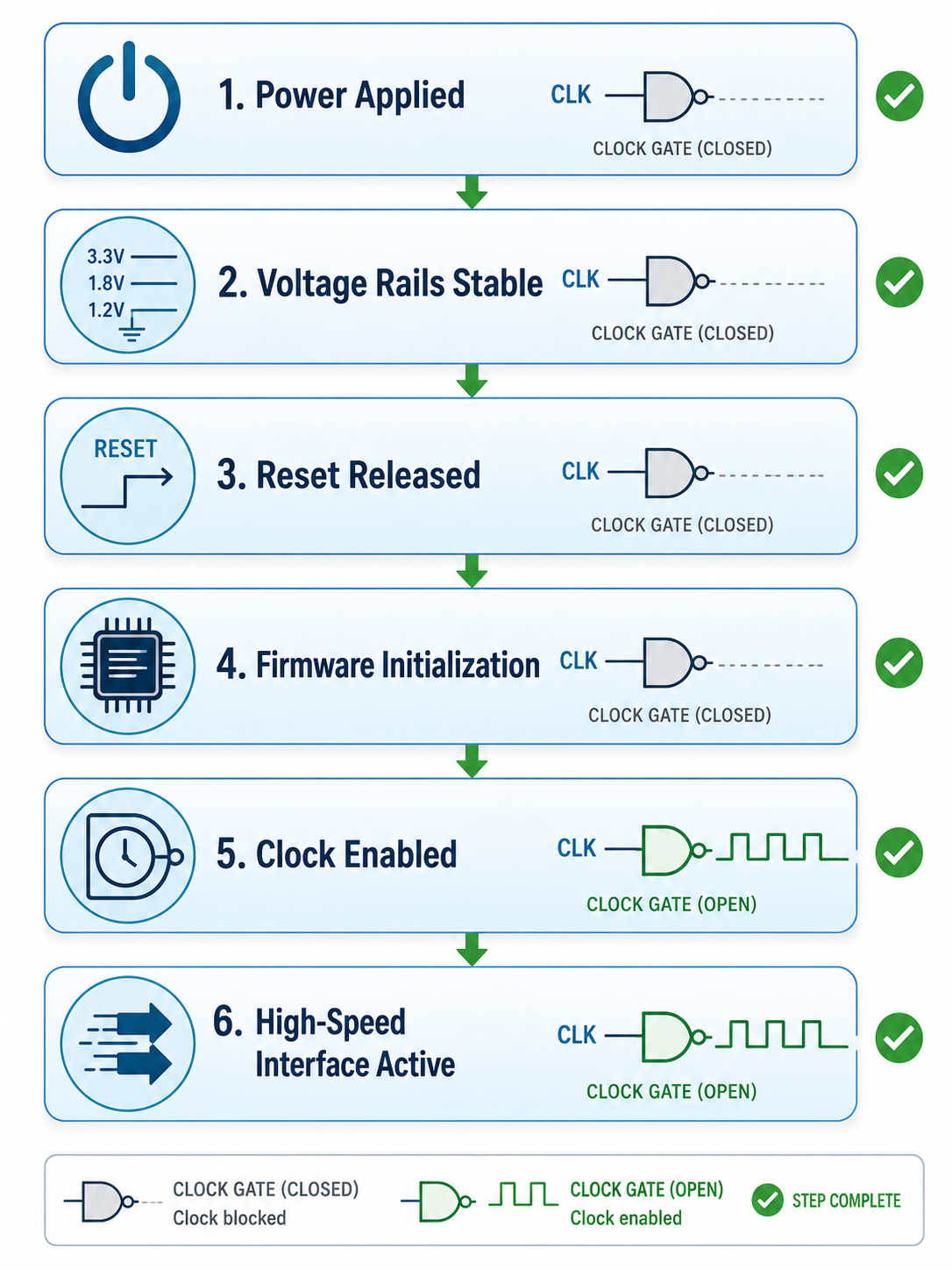
Clock gating is the practice of intentionally preventing clock propagation until a defined startup condition has been satisfied.
Instead of allowing oscillators or PLL outputs to drive external devices immediately, the clock path is interrupted using enable-controlled buffers, clock multiplexers, or dedicated gating logic.
The boot sequence becomes deterministic:
Power Applied
│
▼
Voltage Rails Stabilize
│
▼
Reset Released
│
▼
Firmware Initialization
│
▼
Peripheral Configuration
│
▼
Clock Enabled
│
▼
Normal Communication
This approach ensures that no peripheral observes clock activity before it is capable of processing it correctly.
In practice, clock gating dramatically reduces intermittent startup failures that are otherwise difficult to reproduce.
Controlled Pull Strategies Prevent Floating Logic
While clocks determine when information moves, pull resistors determine what idle state exists before communication begins.
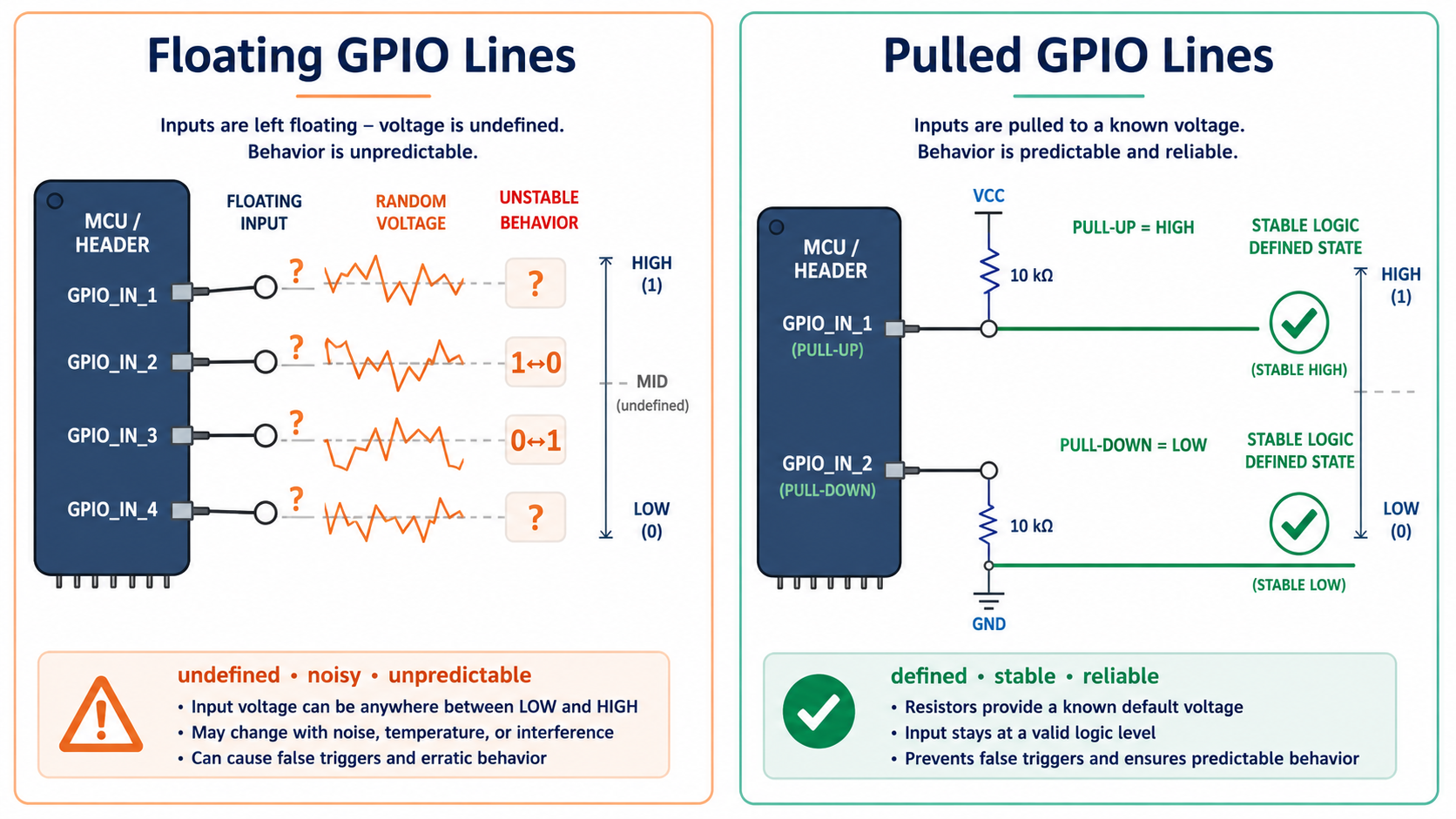
During boot, GPIOs often remain high impedance.
Without defined pull-up or pull-down resistors, signal lines float to unpredictable voltages influenced by leakage currents, PCB capacitance, neighboring traces, and electromagnetic interference.
A floating digital input may randomly alternate between logic high and logic low.
For high-speed interfaces, this uncertainty can be disastrous.
Imagine a chip-select line floating low while SPI clocks are stabilizing. The peripheral may interpret noise as commands.
Similarly, an enable signal left floating high may activate a transmitter before its receiving device is powered.
Controlled pull strategies eliminate ambiguity.
Every critical signal should have a defined electrical state from the instant power is applied until firmware deliberately changes it.
The board should never depend on software to establish a safe idle condition.
Selecting the Right Pull Direction
Choosing whether to use a pull-up or pull-down resistor is not arbitrary.
The objective is to place every subsystem into its safest inactive state during boot.
Typical examples include:
- Chip Select → Pulled High to deselect SPI devices
- Enable Signals → Pulled Low to keep peripherals disabled
- Reset Inputs → Pulled High if active-low reset architecture is used
- Clock Enable Pins → Pulled Low until initialization completes
- Interrupt Outputs → Defined idle level to prevent false wake events
- Mode Selection Pins → Fixed through resistor networks for deterministic startup
When every interface begins in a known electrical condition, the system behaves consistently regardless of power sequencing variations.
This philosophy significantly improves production yield and field reliability.
Combining Clock Gating with Controlled Pulls
Clock gating and pull strategies are individually powerful, but together they create exceptionally robust boot behaviour.
Consider a high-speed camera subsystem.
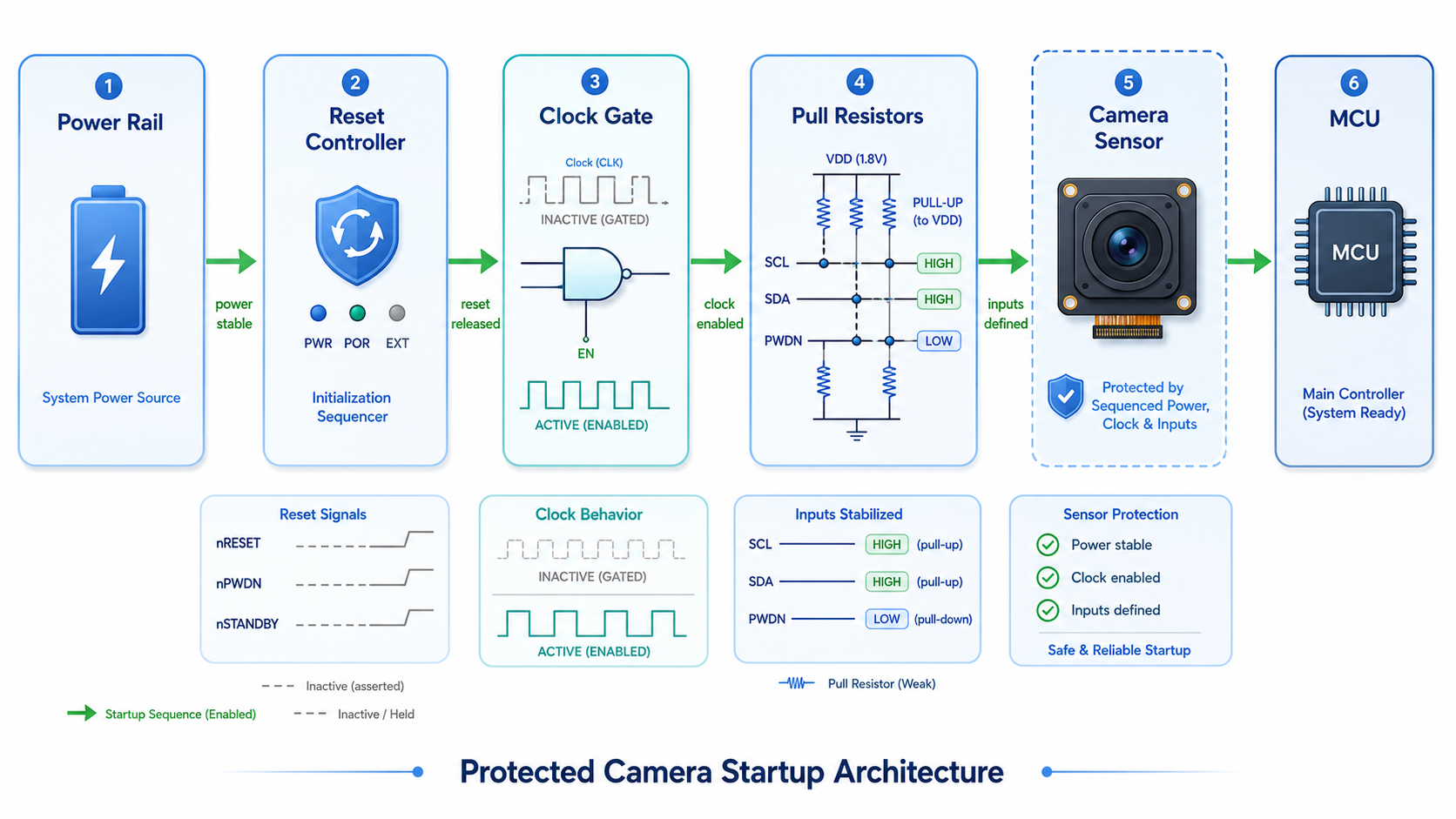
Instead of relying on firmware timing alone, the hardware startup sequence becomes:
- Camera power rail stabilises.
- Reset remains asserted.
- Clock output remains gated.
- Data lines stay in defined idle states through pull resistors.
- Firmware verifies regulator status.
- Clock gate is enabled.
- Reset is released.
- Sensor begins streaming.
At no point does the camera observe unstable clocks or floating control signals.
This hardware-driven sequencing reduces dependence on software timing and eliminates race conditions that only appear under temperature or manufacturing variations.
Lessons from Multi-Sensor Product Development
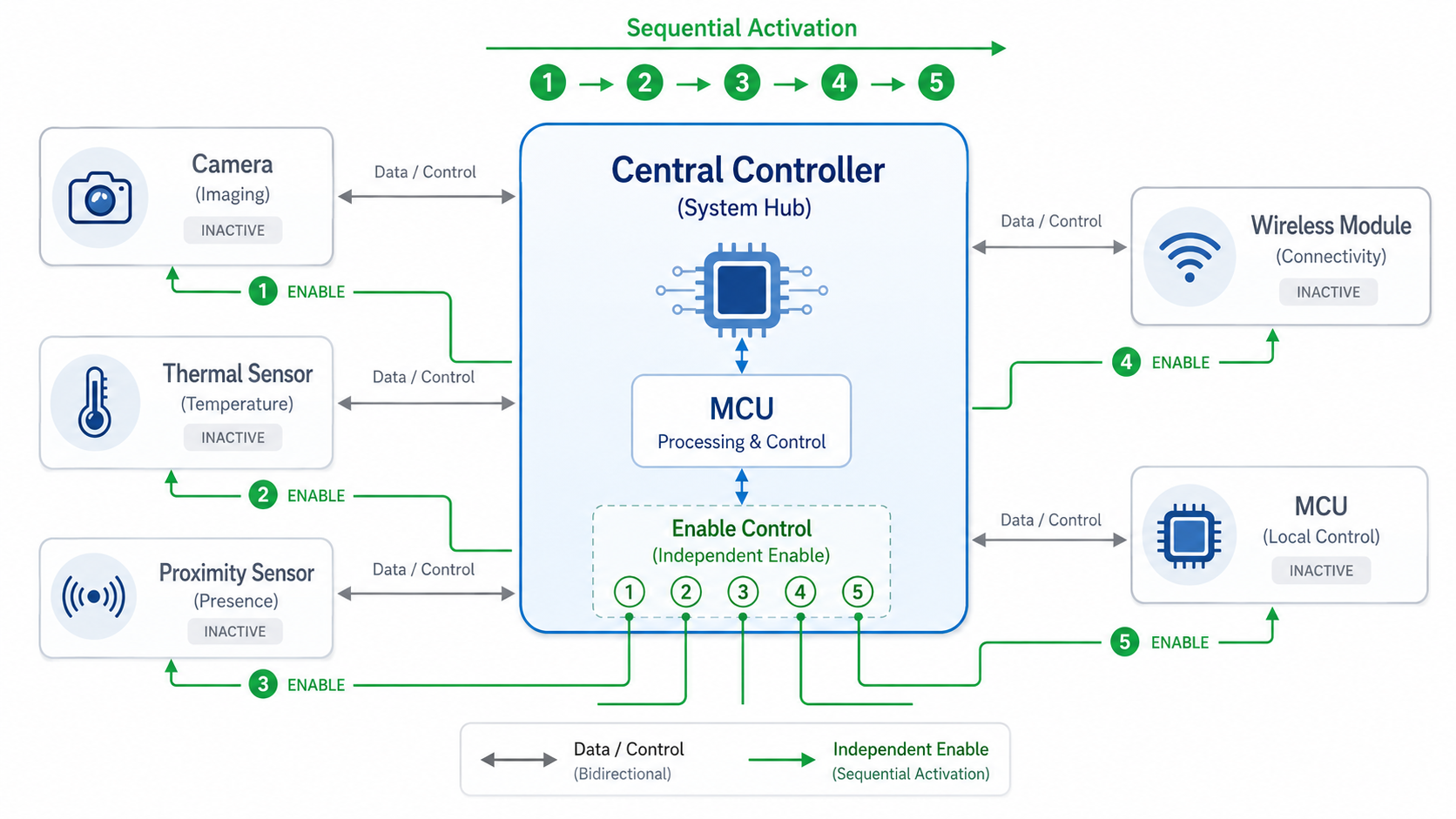
Products integrating multiple imaging and sensing technologies present unique startup challenges.
In platforms similar to Hoomanely's EverBowl architecture, thermal imager, proximity sensor, CMOS camera, and communication interfaces coexist on the same board. Each device has independent power domains and different initialisation requirements.
If every interface activates simultaneously, transient interactions become unavoidable.
Instead, each subsystem should be isolated until intentionally enabled.
The benefits include:
- Reduced inrush current during startup
- Lower electromagnetic emissions
- Cleaner power rail stabilisation
- Deterministic interface initialisation
- Easier debugging during manufacturing
- Improved long-term reliability
Rather than treating boot as a chaotic transition period, the hardware transforms it into a carefully orchestrated sequence.
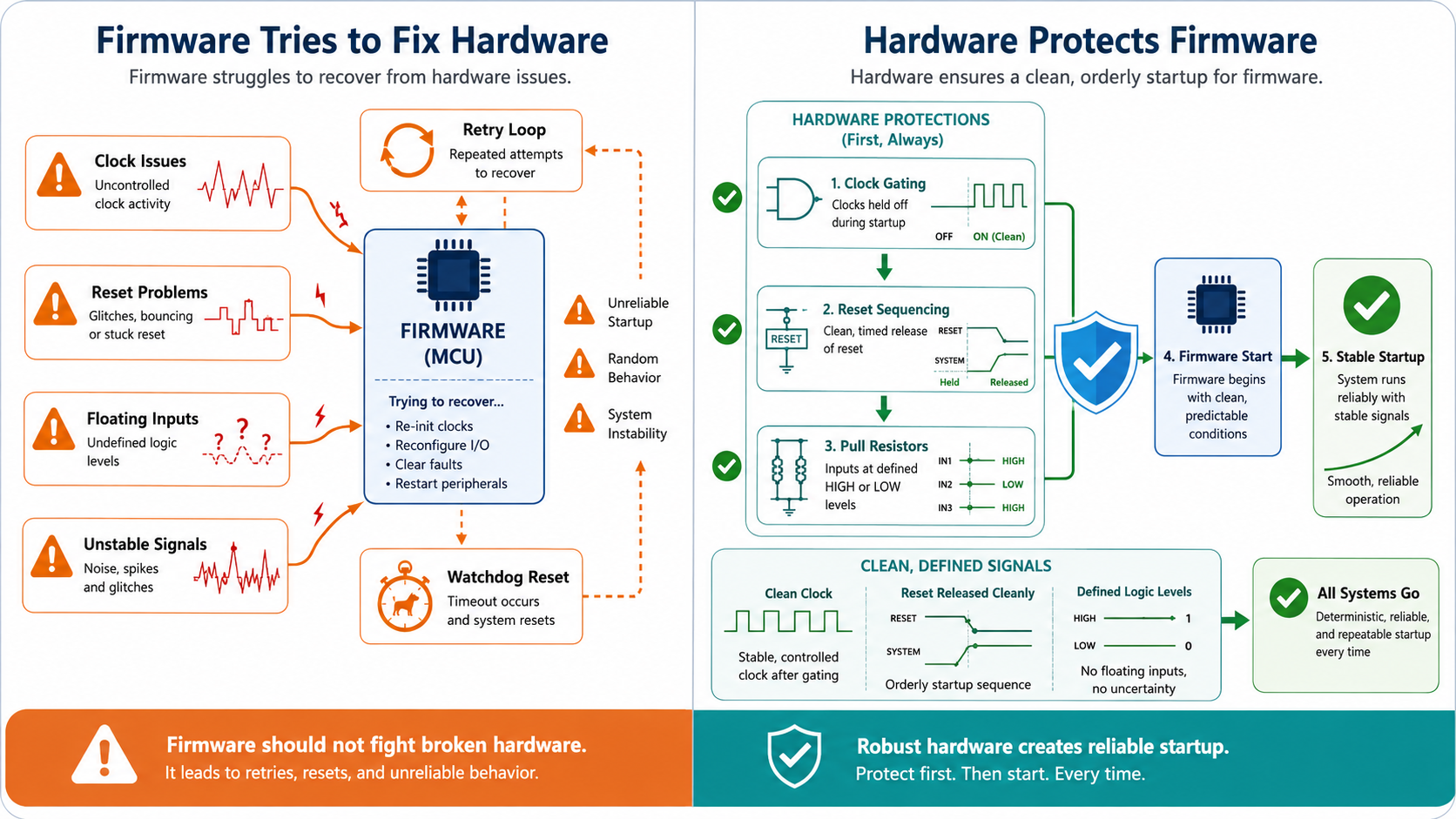
Hardware Should Protect Firmware
Firmware developers often spend weeks adding delays, retries, watchdog resets, and recovery routines to compensate for unpredictable hardware startup.
While these mechanisms improve robustness, they should not replace proper hardware design.
If an interface occasionally fails because a clock appeared too early or a control line floated during boot, software merely hides the symptom rather than eliminating the root cause.
Good hardware ensures that firmware always starts from a known state.
When clocks remain gated and control signals remain defined until initialization completes, firmware becomes simpler, boot times become shorter, and system behavior becomes repeatable across millions of power cycles.
This philosophy is especially valuable in consumer products expected to operate unattended for years.
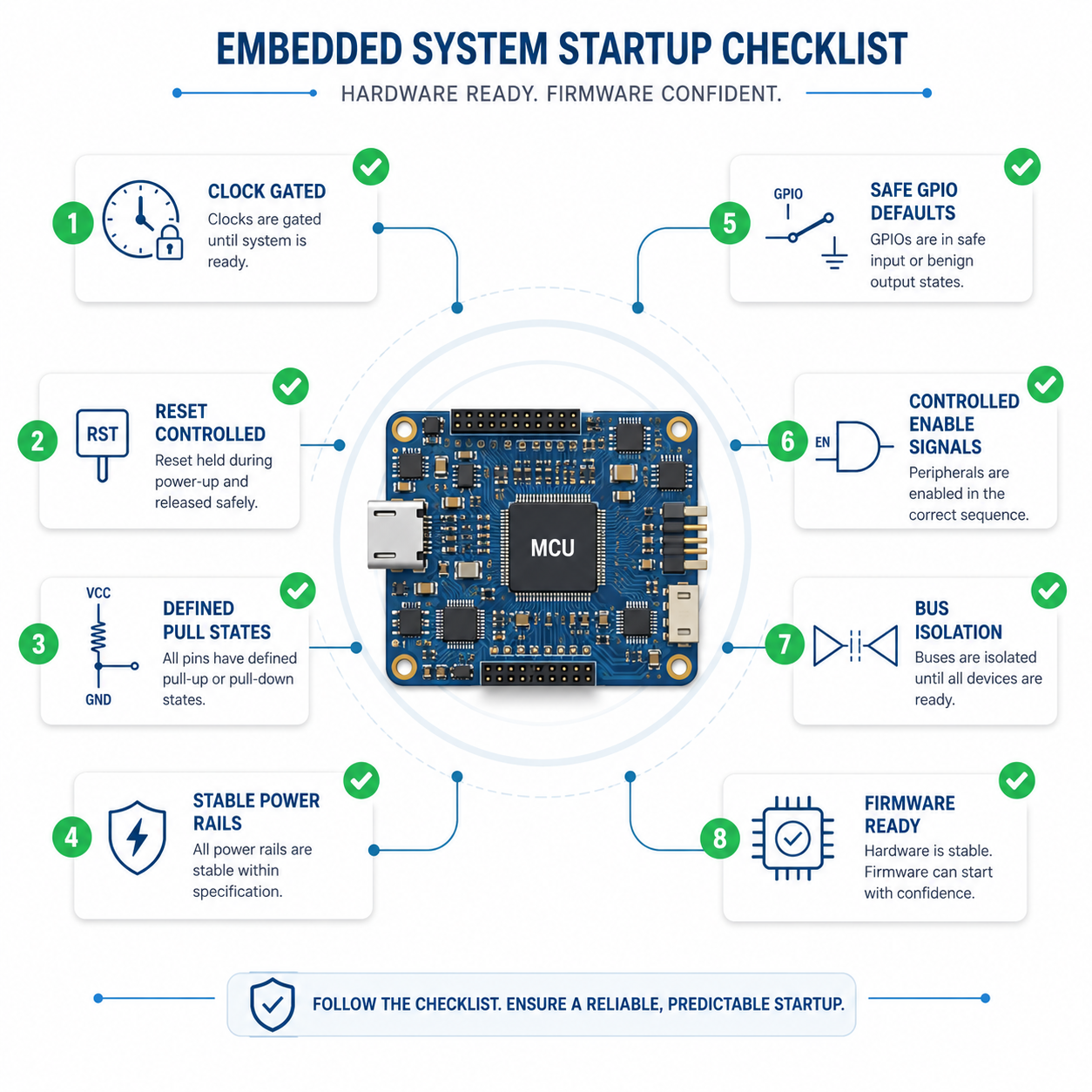
Design Checklist for Quiet Boot Interfaces
Before releasing a board for production, every high-speed interface should be evaluated with a simple question:
What happens before firmware starts?
A reliable design should satisfy the following conditions:
✓ External clocks remain disabled until peripherals are initialised.
✓ Enable signals default to the inactive state through hardware pulls.
✓ Reset signals remain asserted until supplies stabilise.
✓ High-speed data lines have defined idle behaviour.
✓ Shared buses cannot experience contention during startup.
✓ Floating GPIOs are eliminated through appropriate resistor networks.
✓ Power sequencing aligns with peripheral datasheet requirements.
✓ Clock sources activate only after firmware explicitly enables them.
When these conditions are met, startup becomes deterministic rather than probabilistic.
Conclusion
High-speed interface design is often associated with impedance control, differential routing, and signal integrity analysis. Yet many of the most difficult field failures originate long before data begins moving across those carefully designed traces.
The first few milliseconds after power is applied define the electrical state of the entire system.
By treating clocks as controlled resources instead of always-on signals, and by ensuring every critical line has a defined hardware state through carefully planned pull strategies, engineers can eliminate an entire class of intermittent startup failures.
At Hoomanely, our experience building intelligent embedded products has reinforced a simple principle: the best interfaces are silent until they are truly ready to communicate.
A board that boots quietly almost always boots reliably. And in embedded systems, reliability is not created by chance—it is engineered from the very first clock edge.