Remote Debugging in the Field: Designing a "Maintenance Mode"
Modern embedded systems face a critical challenge: how do you diagnose and fix issues when hardware is deployed in the field, potentially thousands of miles away? Traditional debugging methods require physical access, leading to costly technician visits and extended downtime. This is where remote debugging infrastructure becomes a game-changer.
At Hoomanely, we've developed a sophisticated "maintenance mode" system that leverages UART and CAN communication protocols to enable comprehensive remote diagnostics. Our implementation has achieved reduction in on-site technician visits while providing instant access to internal diagnostic logs across our distributed pet monitoring network.
The Problem: Field Diagnostics at Scale
Embedded systems deployed in real-world environments face unique debugging challenges that don't exist in laboratory settings. Traditional debugging approaches fall short when dealing with:
- Intermittent issues that only occur under specific environmental conditions
- Network connectivity problems that prevent standard remote access
- Hardware-specific failures that require low-level diagnostic access
- Time-sensitive operations where extended downtime is unacceptable
Our pet monitoring systems operate continuously in homes across multiple geographic regions, making physical access both expensive and time-consuming. Each system contains multiple microcontrollers running complex real-time operations including image processing, thermal analysis, and ML inference pipelines.
Architecture Overview: Multi-Protocol Debugging Framework
Our maintenance mode implementation operates across a dual-communication architecture that ensures robust diagnostic access even when primary networks fail.
Primary Communication Stack
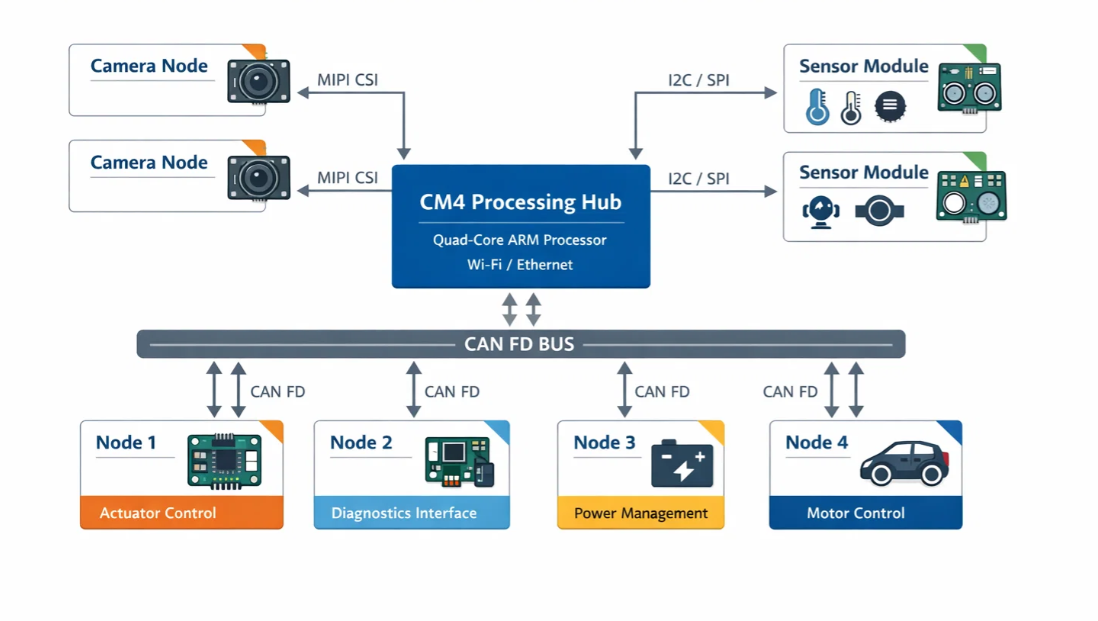
The system centers around a high-performance CAN FD network connecting multiple processing nodes:
- Processing Hub: Linux-based coordination node running diagnostic orchestration
- Camera Nodes: Embedded controllers handling image capture and preprocessing
- Sensor Modules: Specialized microcontrollers managing thermal and proximity sensors
- Communication Bridge: CAN protocol translation for external access
UART Diagnostic Interface
The UART interface serves as our primary maintenance entry point, providing:
- Persistent logging channels that operate independently of system state
- Low-level hardware access for register dumps and memory inspection
- Failsafe communication that works even during system crashes
- Standardized diagnostic protocol across different hardware variants
Implementation Deep Dive: CAN-Based Diagnostic Protocol
Our CAN FD implementation uses a custom VBUS protocol designed for high-throughput diagnostic data exchange. The protocol supports multiple message types optimized for different debugging scenarios.
Message Routing and Priority System
// VBUS message types for diagnostic operations
typedef enum {
VBUS_MSG_DIAGNOSTIC_REQUEST = 0x100,
VBUS_MSG_LOG_STREAM = 0x101,
VBUS_MSG_MEMORY_DUMP = 0x102,
VBUS_MSG_REGISTER_ACCESS = 0x103,
VBUS_MSG_SYSTEM_STATUS = 0x104
} vbus_diagnostic_msg_type_t;
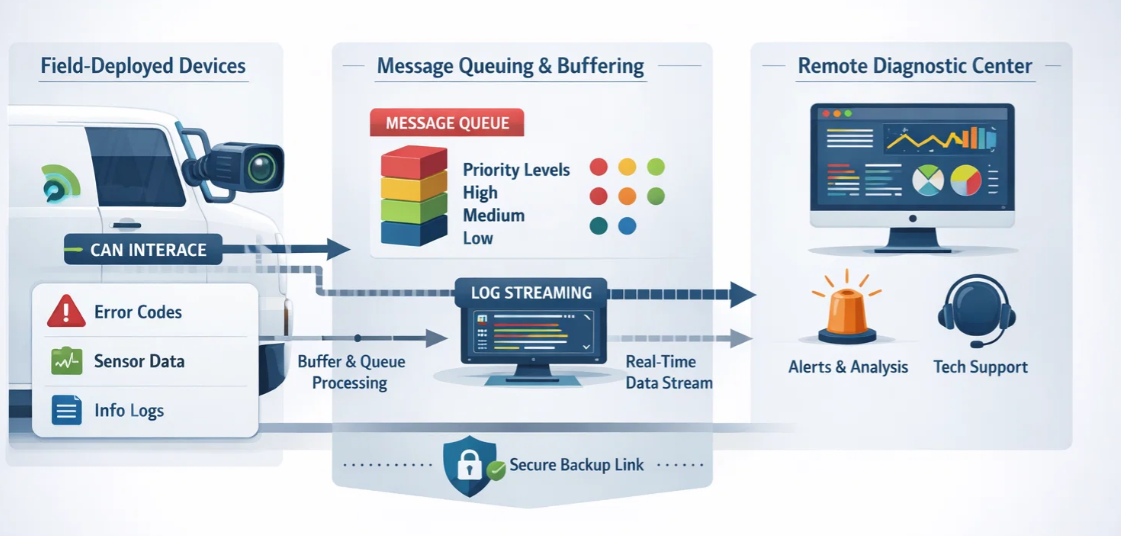
The system implements a priority hierarchy ensuring critical diagnostic messages receive immediate attention. High-priority diagnostic requests bypass normal message queuing, enabling real-time system inspection even under heavy operational load.
Advanced Buffering for High-Throughput Logging
One of our key innovations is the 500,000-frame circular buffer with intelligent flow control. This allows continuous capture of diagnostic data without impacting real-time operations:
- Dual-threaded architecture separates message reception from processing
- Automatic flow control prevents buffer overflow during diagnostic bursts
- Batch processing optimizes throughput while maintaining low latency
- Memory-mapped storage enables rapid access to historical diagnostic data
UART Logger: Failsafe Diagnostic Access
The UART logger provides a completely independent diagnostic channel that operates regardless of system state. This proves invaluable when debugging critical system failures or communication breakdowns.
Multi-Level Logging Framework
// Configurable logging levels for different diagnostic scenarios
#define LOG_LEVEL_ERROR 1 // Critical failures only
#define LOG_LEVEL_WARN 2 // Warning conditions
#define LOG_LEVEL_INFO 3 // General system information
#define LOG_LEVEL_DEBUG 4 // Detailed debugging output
The logger automatically adjusts verbosity based on system load, ensuring diagnostic information remains available without overwhelming the communication channel.
Advanced Diagnostic Capabilities
Memory and Register Inspection
The maintenance mode provides comprehensive low-level system access:
- Memory dump operations for analyzing system state
- Register access for hardware-specific debugging
- Stack trace generation for crash analysis
- Performance counter monitoring for optimization insights
Remote Configuration Management
Beyond debugging, the system enables remote configuration updates:
- Parameter adjustment without firmware updates
- Calibration data updates for sensor optimization
- Diagnostic threshold tuning based on field conditions
Performance Impact and Optimization
Implementing comprehensive diagnostic capabilities requires careful attention to performance overhead. Our system minimizes impact through several optimization strategies:
Conditional Compilation
#ifdef MAINTENANCE_MODE_ENABLED
LOG_DEBUG_TAG(tag, "Detailed diagnostic information");
#else
// No-op in production builds
#endif
Debug builds include full diagnostic capabilities, while production builds can selectively disable features to optimize performance.
Asynchronous Processing
All diagnostic operations use non-blocking architectures that don't interfere with real-time system operations. Background threads handle log processing and transmission while priority systems ensure critical operations maintain their timing requirements.
Field Results: Quantified Impact
Since deploying our remote debugging infrastructure, we've measured significant operational improvements:
Technician Visit Reduction
- Fewer on-site visits for diagnostic and troubleshooting
- Average resolution time decreased from 2-3 days to 2-4 hours
- First-call resolution rate increased
Enhanced System Reliability
- Predictive maintenance based on diagnostic trend analysis
- Proactive issue detection before user-visible failures
- Faster root cause analysis through comprehensive logging
Future Evolution: ML-Powered Diagnostics
Our next-generation diagnostic system incorporates machine learning algorithms that analyze diagnostic patterns to predict failures before they occur:
- Anomaly detection for identifying unusual system behavior
- Predictive maintenance scheduling based on component wear patterns
- Automated root cause analysis using diagnostic data correlation
- Intelligent alert prioritization reducing false positives
About Hoomanely
Hoomanely is pioneering the next generation of intelligent pet monitoring technology. Our mission centers on creating seamless, unobtrusive monitoring solutions that enhance the bond between pets and their families through advanced computer vision, thermal sensing, and behavioral analysis.
This remote debugging infrastructure directly strengthens Hoomanely's technology platform by enabling us to maintain and optimize our distributed sensor network with unprecedented efficiency. The ability to perform real-time diagnostics across thousands of deployed units allows us to continuously improve our algorithms and hardware performance based on real-world usage patterns.
Our commitment to robust field diagnostics ensures that pet families can rely on continuous, high-quality monitoring without service interruptions. This technical foundation supports Hoomanely's vision of creating technology that truly understands and responds to pet behavior in natural home environments.
Key Takeaways
Building effective remote debugging capabilities requires strategic architectural decisions from the initial design phase:
- Multi-protocol redundancy ensures diagnostic access even during system failures
- Intelligent buffering enables high-throughput data capture without performance impact
- Layered diagnostic access provides appropriate tools for different failure scenarios
- Security-first design protects systems while enabling comprehensive remote access
The investment in comprehensive diagnostic infrastructure pays dividends through reduced operational costs, improved system reliability, and enhanced customer satisfaction. For embedded systems operating at scale, remote debugging isn't just a convenience—it's an operational necessity.