Advanced ToF Proximity Sensing: Beyond Distance to Behavioral Intelligence

Building intelligent proximity detection systems that transform simple distance measurements into actionable behavioral insights for health monitoring applications.
Introduction
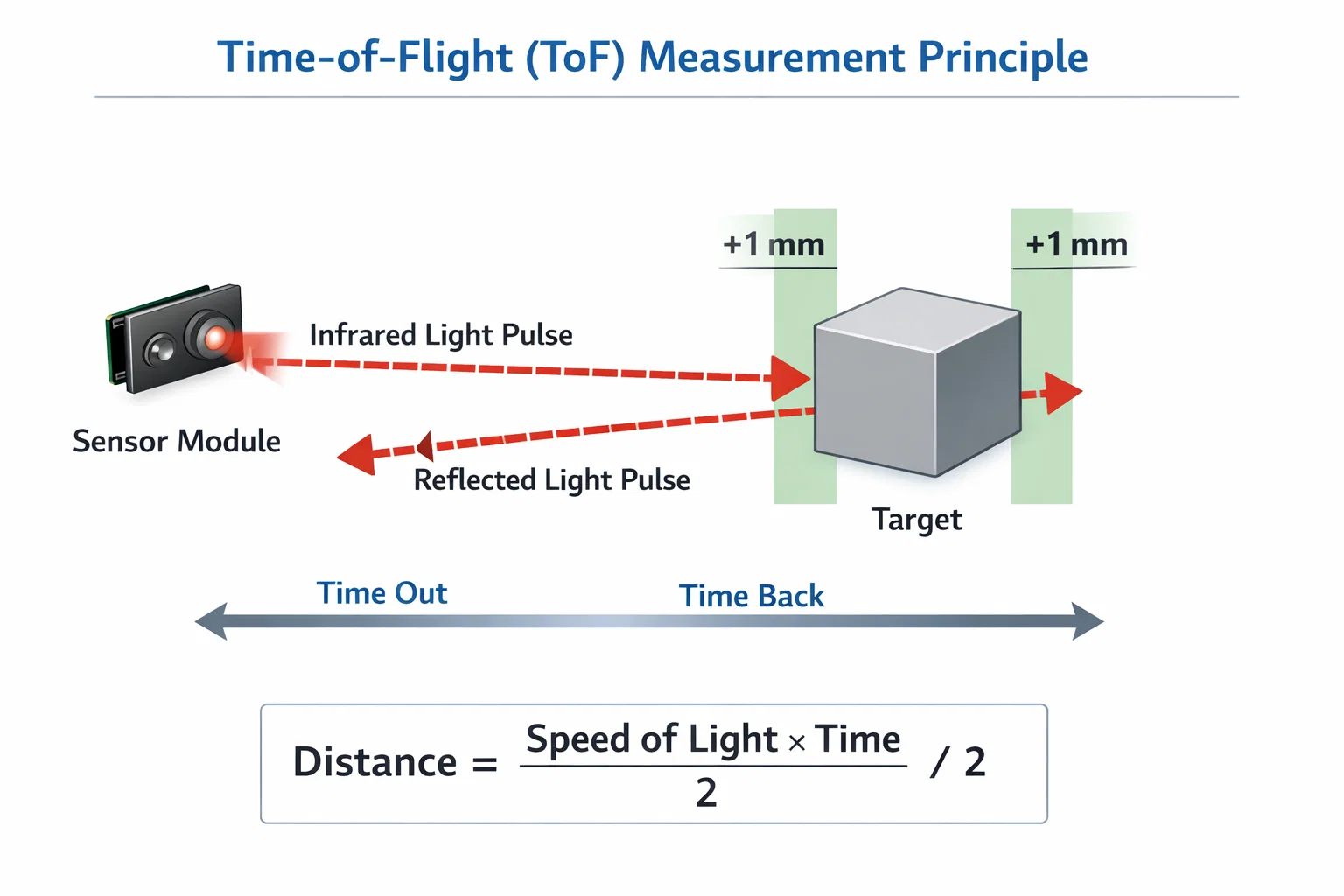
Distance measurement seems straightforward—point a sensor, read a number. But what if that simple measurement could reveal complex behavioral patterns, detect subtle health changes, and provide early warnings for safety concerns?
In health monitoring systems, proximity sensing has evolved far beyond basic obstacle detection. Modern Time-of-Flight (ToF) sensors, when properly calibrated and intelligently processed, can differentiate between normal movement patterns and concerning behavioral changes. They can detect feeding habits, sleep disturbances, and even emergency situations—all from analyzing distance data over time.
This article explores the engineering challenges of building robust, intelligent proximity sensing systems that deliver clinical-grade accuracy while maintaining real-time responsiveness in embedded health monitoring devices.
The Challenge: From Raw Distance to Behavioral Intelligence
Precision Requirements in Health Applications
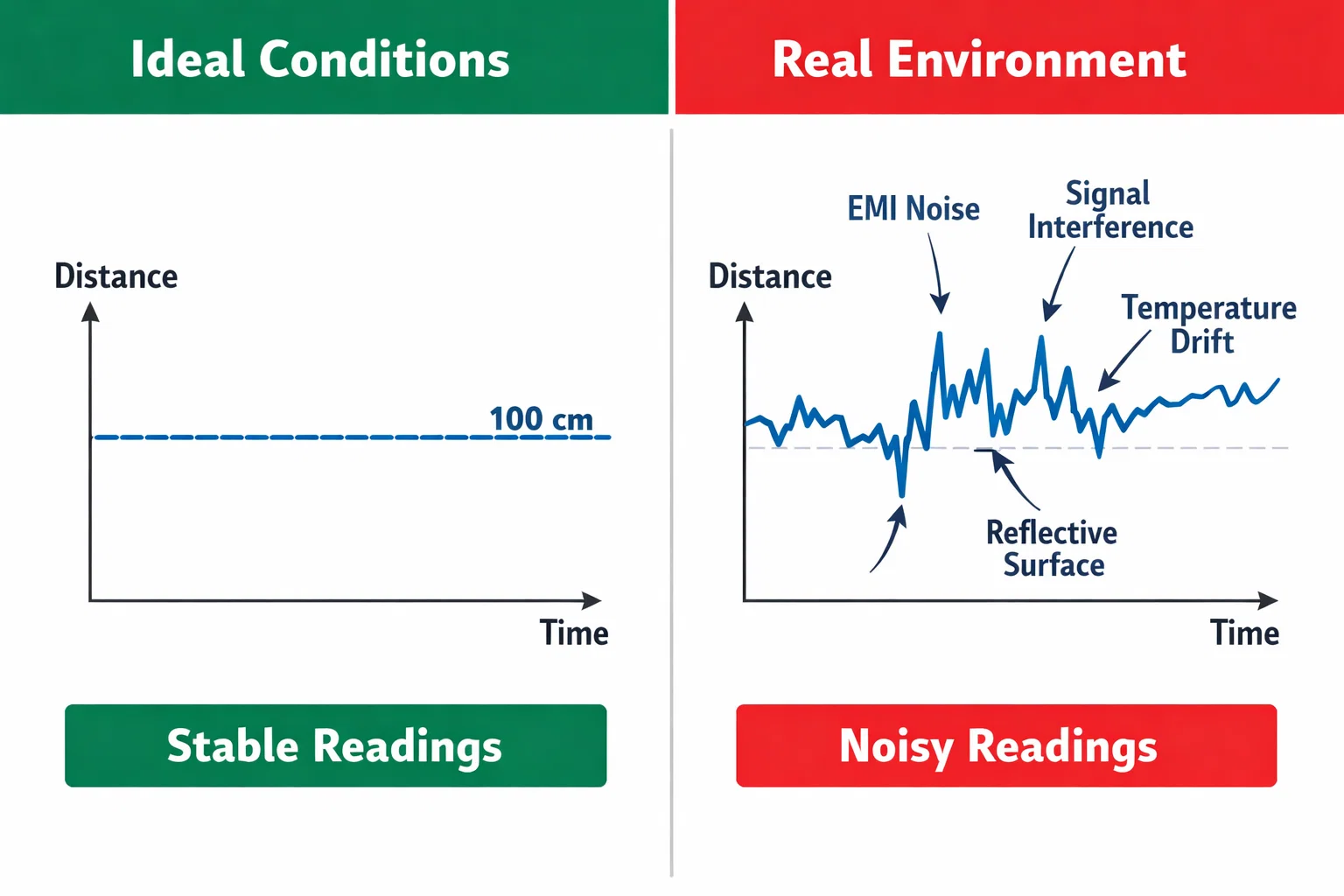
Health monitoring demands exceptional accuracy. A 5mm error might mean the difference between detecting normal movement and missing a critical health event. Traditional proximity sensors often struggle with:
- Environmental interference from ambient light and electromagnetic noise
- Temperature drift affecting measurement consistency across seasons
- Cross-talk between multiple sensors in close proximity
- Material reflectance variations causing inconsistent readings
Real-Time Processing Constraints
Embedded systems must process sensor data within strict timing constraints while managing multiple concurrent tasks. The challenge intensifies when:
- Multiple sensors require synchronized calibration
- Behavioral algorithms need continuous data streams
- Safety systems demand sub-50ms response times
- Power efficiency limits processing complexity
Calibration: The Foundation of Accuracy
Multi-Point Calibration Strategy
Effective ToF calibration requires addressing systematic errors through multiple calibration points:
Offset Calibration eliminates fixed distance errors by measuring a known target at a standard distance (typically 140mm). The system calculates the offset correction factor:
offset_correction = measured_distance - actual_distance
Cross-talk Calibration addresses internal reflections by measuring targets at extended distances (400mm+) and analyzing signal characteristics to identify and compensate for internal interference patterns.
Temperature Compensation
ToF sensors experience significant drift across temperature ranges. Our implementation stores calibration data with temperature coefficients:
typedef struct {
int16_t offset;
uint16_t xtalk;
float calibTemperature;
uint32_t calibrationDate;
} CalibrationData_t;
During operation, the system applies temperature-compensated corrections:
corrected_distance = raw_distance +
offset_correction +
(current_temp - calib_temp) * temp_coefficient
Persistent Calibration Storage
Calibration data persistence uses redundant flash storage with integrity verification:
HAL_StatusTypeDef StoreCalibration(CalibrationData_t *calibData) {
// Calculate integrity checksum
calibData->checksum = CalculateChecksum(calibData);
// Store to primary and backup locations
WriteToFlash(PRIMARY_CALIB_ADDR, calibData);
WriteToFlash(BACKUP_CALIB_ADDR, calibData);
return ValidateStoredData();
}
This approach ensures calibration data survives power failures, firmware updates, and flash memory degradation.
Advanced Signal Processing for Behavioral Analysis
Real-Time Filtering Architecture
Raw ToF measurements contain noise that can mask behavioral patterns. A multi-stage filtering approach provides clean, actionable data:
Stage 1: Outlier Rejection
bool IsValidMeasurement(uint16_t distance, uint8_t status) {
return (status == RANGE_VALID) &&
(distance >= MIN_VALID_RANGE) &&
(distance <= MAX_VALID_RANGE);
}
Stage 2: Temporal Smoothing
// IIR filter for noise reduction
smoothed_distance = (previous_smooth * 7 + current_distance) / 8;
Stage 3: Pattern Recognition
The system analyzes distance patterns to identify behavioral events:
typedef struct {
uint16_t min_distance;
uint16_t max_distance;
uint32_t duration_ms;
BehaviorCallback_t callback;
} BehaviorPattern_t;
Intelligent Range Triggers
Traditional proximity sensors use simple threshold detection. Behavioral analysis requires sophisticated trigger logic:
void ProcessProximityData(uint16_t distance) {
static uint32_t entry_time = 0;
static bool in_range = false;
bool currently_in_range = (distance >= trigger.min_distance) &&
(distance <= trigger.max_distance);
if (currently_in_range && !in_range) {
// Entry detected
entry_time = HAL_GetTick();
in_range = true;
} else if (!currently_in_range && in_range) {
// Exit detected
uint32_t duration = HAL_GetTick() - entry_time;
AnalyzeBehavior(duration, distance);
in_range = false;
}
}
This approach captures both presence detection and behavioral timing, enabling analysis of movement patterns, feeding duration, and activity levels.
Memory-Efficient Data Management
Circular Buffer Implementation
Continuous behavioral monitoring generates substantial data volumes. A circular buffer approach maintains recent history without exhausting memory:
#define BEHAVIOR_HISTORY_SIZE 1024
typedef struct {
uint32_t timestamp;
uint16_t distance;
uint8_t behavior_flags;
} BehaviorEvent_t;
static BehaviorEvent_t behavior_history[BEHAVIOR_HISTORY_SIZE];
static uint16_t history_index = 0;
Flash-Based Pattern Storage
Long-term behavioral patterns require persistent storage using LittleFS on external flash:
int StoreBehaviorPattern(BehaviorPattern_t *pattern) {
char filename[32];
snprintf(filename, sizeof(filename), "behavior_%lu.dat",
HAL_GetTick() / 86400000); // Daily files
return WritePatternToFlash(filename, pattern);
}
Power Optimization Strategies
Adaptive Measurement Rates
Behavioral monitoring must balance responsiveness with power consumption:
void AdaptMeasurementRate(BehaviorContext_t context) {
switch(context) {
case ACTIVE_MONITORING:
SetMeasurementPeriod(100); // 10Hz for real-time
break;
case BACKGROUND_TRACKING:
SetMeasurementPeriod(1000); // 1Hz for efficiency
break;
case SLEEP_MODE:
SetMeasurementPeriod(10000); // 0.1Hz minimal
break;
}
}
Intelligent Wake/Sleep Cycles
The system uses motion-triggered activation to minimize power consumption:
void ConfigureMotionWake(void) {
// Configure interrupt for distance changes >50mm
EnableRangeInterrupt(50);
// Enter low-power mode until motion detected
EnterStopMode();
}
Integration with Health Monitoring Systems
Hoomanely Connection: Transforming Pet Healthcare
At Hoomanely, proximity sensing forms a cornerstone of our comprehensive pet health monitoring ecosystem. Our advanced ToF implementation enables revolutionary capabilities:
Feeding Behavior Analysis: Precise distance measurements detect feeding approach patterns, duration, and frequency. Subtle changes often indicate health issues before obvious symptoms appear.
Activity Level Monitoring: Continuous proximity tracking reveals activity patterns that correlate with age-related health changes, joint problems, or emerging medical conditions.
Safety and Emergency Detection: Rapid behavioral pattern recognition identifies unusual situations—from falls to seizures—enabling immediate caregiver alerts.
Social Interaction Tracking: Multi-zone proximity sensing maps social behaviors between pets and family members, providing insights into emotional well-being and stress levels.
This proximity intelligence integrates seamlessly with Hoomanely's broader ecosystem of thermal imaging, visual monitoring, and environmental sensing to create the most comprehensive pet health platform available.
Implementation Challenges and Solutions
Multi-Sensor Coordination
Health monitoring often requires multiple proximity sensors for complete coverage:
typedef struct {
uint8_t sensor_id;
uint16_t current_distance;
uint32_t last_update;
bool calibrated;
} SensorNode_t;
static SensorNode_t sensor_array[MAX_SENSORS];
Challenge: Cross-talk between closely spaced sensors
Solution: Time-division multiplexing with synchronized measurement windows
void CoordinatedMeasurement(void) {
for(int i = 0; i < active_sensors; i++) {
ActivateSensor(i);
vTaskDelay(pdMS_TO_TICKS(10)); // Isolation period
TakeMeasurement(i);
DeactivateSensor(i);
}
}
Real-Time Constraint Management
FreeRTOS task prioritization ensures critical measurements maintain timing requirements:
#define PROXIMITY_TASK_PRIORITY (configMAX_PRIORITIES - 2)
#define MEASUREMENT_TIMEOUT_MS 33
BaseType_t CreateProximityTask(void) {
return xTaskCreate(ProximityTask,
"Proximity",
PROXIMITY_STACK_SIZE,
NULL,
PROXIMITY_TASK_PRIORITY,
&proximityTaskHandle);
}
Performance Optimization and Debugging
Memory Usage Optimization
Embedded systems require careful memory management for behavioral processing:
// Stack allocation for temporary processing
uint16_t distance_buffer[PROCESSING_WINDOW_SIZE];
// Static allocation for persistent data
static volatile uint16_t latest_distance;
static volatile uint32_t measurement_timestamp;
// Dynamic allocation only for large datasets
BehaviorEvent_t *extended_history = NULL;
if(detailed_analysis_required) {
extended_history = malloc(sizeof(BehaviorEvent_t) * EXTENDED_SIZE);
}
Debug and Validation Tools
Production systems need comprehensive debugging capabilities:
void ProximityDiagnostics(void) {
LOG_INFO("Calibration Status: %s", IsCalibrationValid() ? "Valid" : "Invalid");
LOG_INFO("Current Distance: %u mm", GetCurrentDistance());
LOG_INFO("Measurement Rate: %u Hz", GetMeasurementRate());
LOG_INFO("Buffer Usage: %u/%u", GetBufferUsage(), BUFFER_SIZE);
LOG_INFO("Pattern Matches: %u", GetPatternMatchCount());
}
Testing and Validation
Automated Calibration Verification
Production systems implement self-validation routines:
bool ValidateCalibration(void) {
// Test against known targets
uint16_t test_distances[] = {100, 200, 500, 1000};
for(int i = 0; i < 4; i++) {
uint16_t measured = MeasureDistance();
uint16_t expected = test_distances[i];
if(abs(measured - expected) > TOLERANCE_MM) {
LOG_ERROR("Calibration validation failed at %u mm", expected);
return false;
}
}
return true;
}
Environmental Testing
Robust proximity systems undergo extensive environmental validation:
- Temperature cycling: -20°C to +60°C operation
- Humidity testing: 10% to 95% RH non-condensing
- Vibration resistance: 10-2000 Hz frequency sweep
- EMI immunity: Various interference sources
Future Directions and Advanced Features
Machine Learning Integration
Edge-based machine learning can enhance behavioral pattern recognition:
// Simplified ML inference pipeline
typedef struct {
float features[FEATURE_COUNT];
float weights[FEATURE_COUNT];
float bias;
} MLModel_t;
BehaviorType_t ClassifyBehavior(uint16_t *distance_history) {
float features[FEATURE_COUNT];
ExtractFeatures(distance_history, features);
float score = MLInference(&model, features);
return (score > THRESHOLD) ? ABNORMAL_BEHAVIOR : NORMAL_BEHAVIOR;
}
Multi-Modal Fusion
Combining proximity data with other sensor modalities improves accuracy:
- Thermal sensing: Confirms presence and health status
- Visual analysis: Provides context for proximity events
- Environmental monitoring: Adjusts behavioral baselines
- Audio processing: Detects distress or unusual vocalizations
Key Takeaways
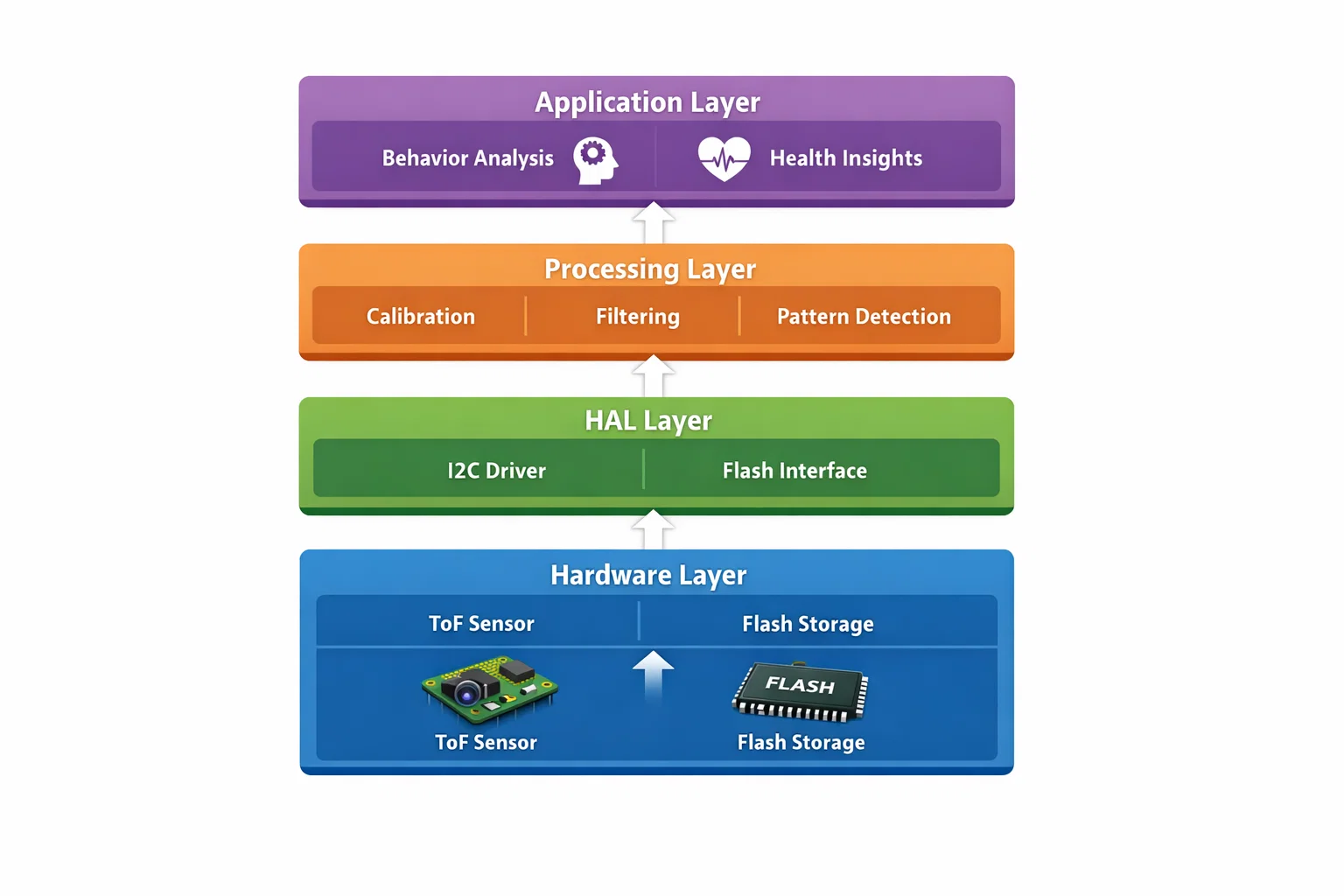
Building intelligent proximity sensing systems requires more than connecting a sensor to a microcontroller. Success depends on:
Rigorous Calibration: Multi-point calibration with temperature compensation ensures clinical-grade accuracy across environmental conditions.
Intelligent Processing: Real-time filtering and pattern recognition transform raw distance data into meaningful behavioral insights.
Robust Architecture: FreeRTOS task management, persistent storage, and error handling create production-ready embedded systems.
Performance Optimization: Memory-efficient algorithms and power management enable continuous monitoring without compromising responsiveness.
Integration Philosophy: Proximity sensing becomes truly valuable when integrated into comprehensive health monitoring ecosystems that correlate multiple data streams.
The future of health monitoring lies not in collecting more data, but in extracting deeper intelligence from the sensors we already have. Advanced proximity sensing demonstrates how thoughtful engineering can transform simple measurements into life-changing insights.



