Designing Around ToF Sensors for Reliable Performance
Introduction
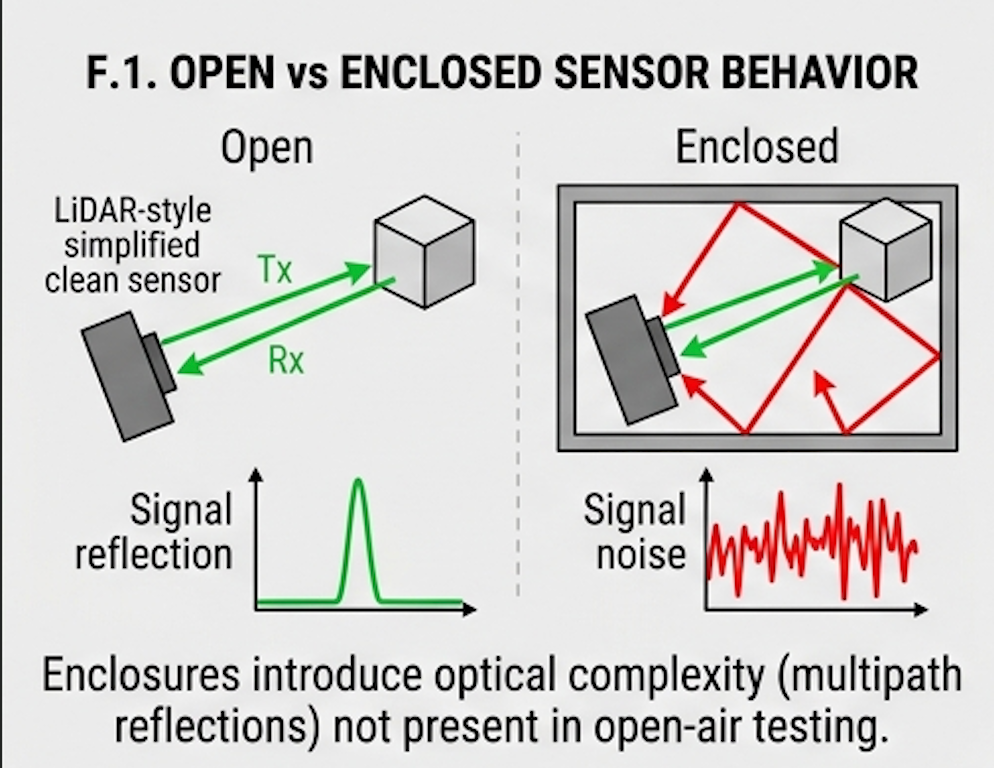
Time-of-Flight (ToF) sensors promise simple, accurate distance measurement—drop them into a design, read distance, and trigger behavior. But in real products, especially enclosed ones, proximity sensing quickly becomes a mechanical + optical system problem, not just an electrical one.
While working with the VL53L1X ToF sensor at Hoomanely, what initially worked perfectly on the bench began to fail inside the enclosure. Stable readings turned into mistriggers, noise, and unpredictable behavior.
The root cause wasn’t firmware. It wasn’t calibration. It was optical crosstalk induced by the enclosure itself.
This blog walks through how a working sensor became unstable, what actually caused it, and how we redesigned the system to make it reliable.
Worked on bench, deviated inside enclos
System Setup
- Sensor: VL53L1X (Time-of-Flight)
- Operating range: ~7 cm to 50 cm
- Field of View: ~27° cone
In open conditions:
- Readings were stable
- Detection was consistent
Inside enclosure:
- False triggers appeared
- Detection became noisy
The system didn’t fail completely—it became unpredictable, which is worse.
Root Cause: Optical Crosstalk
The critical insight was this:
The sensor was detecting its own reflected light—not just the target.
This phenomenon is called optical crosstalk.
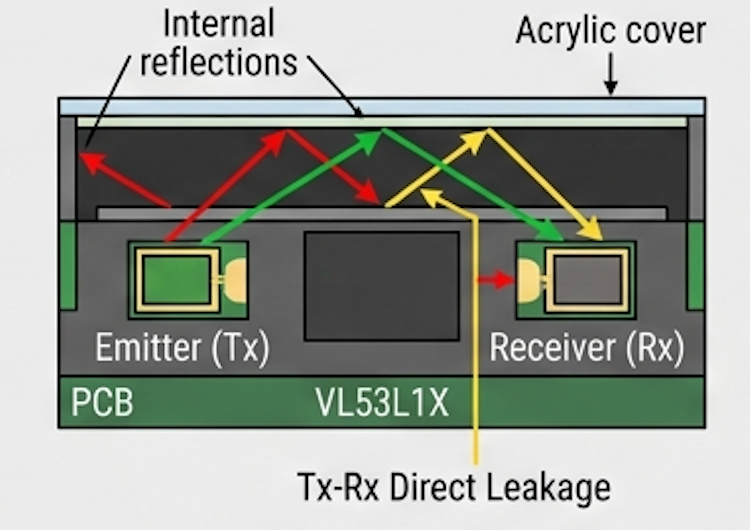
Sources of Crosstalk
- Internal reflections from plastic walls
- Acrylic cover reflections
- Direct leakage from transmitter (Tx) to receiver (Rx)
- Air gaps causing multi-path scattering
Even small reflections inside a compact enclosure can significantly distort ToF readings.
Fundamental Concept: ToF Sensors Are Optical Systems
A ToF sensor works by:
- Emitting infrared light
- Measuring time taken for reflection
- Converting that into distance
This means:
👉 Anything that reflects IR affects the reading
Unlike simple IR proximity sensors, ToF sensors are extremely sensitive to:
- Surface finish
- Geometry
- Optical path control
Engineering Behavior Observed
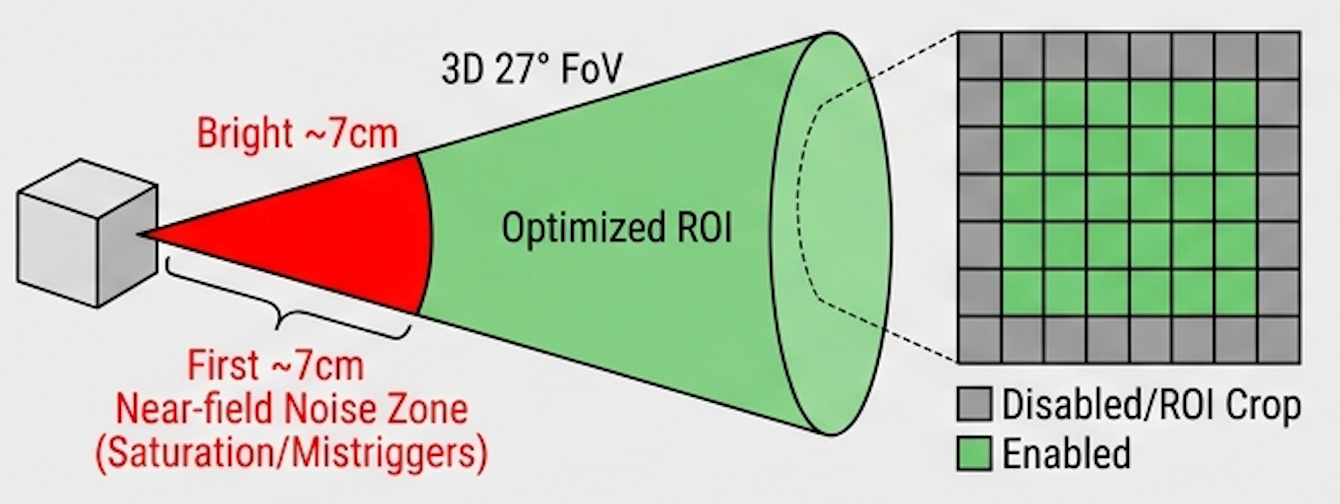
1. Near-Field Instability
Distances below ~70 mm showed high instability.
Why?
- Strong reflections dominate
- Sensor saturates with nearby signals
- Crosstalk becomes significant
Fix Applied
- Changed detection range:
- 4–50 cm ❌ (unstable)
- 7–50 cm ✅ (stable)
2. Air Gap Sensitivity
Observation:
- Acrylic flush (0 mm gap) → stable
- Acrylic offset (~8 mm) → unstable
Why?
Air gaps create:
- Multiple reflection paths
- Signal scattering
- Loss of optical control
Even a few millimeters of gap dramatically changed behavior.
Approach: Treating the Enclosure as Part of the Sensor
The key shift was:
Stop treating the sensor as a component. Start treating the enclosure as part of the optical system.
Instead of tuning firmware, we redesigned the optical environment.
Process: What Actually Fixed the Problem
1. Black Coating (Critical Fix)
This was the most impactful change.
- Internal surfaces painted matte black
- Reduced IR reflections
- Absorbed stray light
Result:
- Significant reduction in false triggers
- Cleaner signal behavior
2. Controlled Aperture Design
Straight Hole ❌
- Acts like an optical tunnel
- Reflects light back to sensor
Countersunk Hole ✅
- Redirects stray light outward
- Reduces internal reflection
3. Light Guide Implementation
Your Setup
- Diameter: 6 mm
- Length: 7.5 mm
- Material: Acrylic
- Coated black externally
Result
- Stable readings
- Reduced noise
- Consistent behavior
Why It Worked
The light guide acted as:
- Optical isolator → blocked side reflections
- Controlled path → guided IR forward
- Noise filter → reduced stray light
This converted a chaotic optical environment into a predictable signal path.
4. Minimizing Air Gap
Design rule implemented:
- Target gap: 0–1 mm
- Avoid floating windows
This ensured:
- Reduced scattering
- Better signal integrity
5. Optimizing Region of Interest (ROI)
By excluding the near-field:
- Removed dominant noise region
- Improved stability
Results: From Unstable to Predictable
After implementing the above:
- False triggers reduced significantly
- Detection stabilized across builds
- Performance became consistent in enclosure
Most importantly:
👉 The system became predictable, not just functional.
Common Mistakes
- Testing only in open condition
- Ignoring enclosure reflections
- Using large air gaps
- Treating ToF sensors like simple IR switches
- Skipping optical isolation
These lead directly to unstable systems.
Case Insight: What This Changed
This experience fundamentally shifted how sensing systems were approached at Hoomanely:
- Sensors are not isolated components
- Mechanical design directly affects signal quality
- Optical paths must be intentionally designed
Engineering Insight
If your ToF sensor behaves differently inside the enclosure, the enclosure is part of the problem—not the sensor.
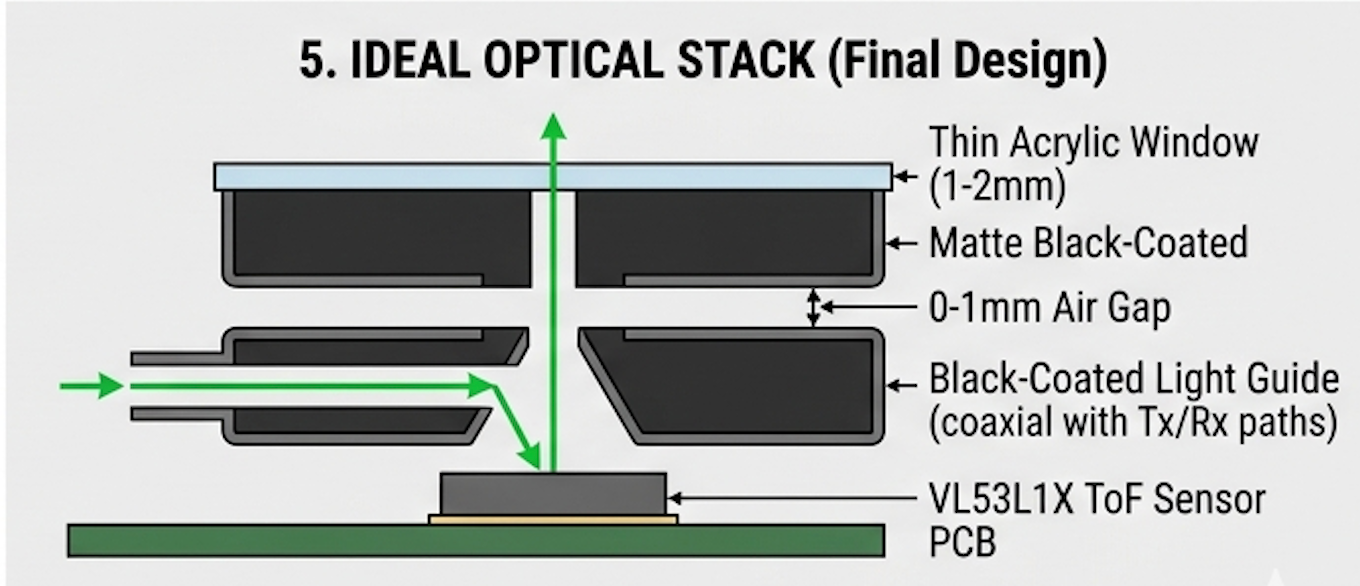
Ideal Optical Stack (Final Design)
Based on all learnings:
- Thin acrylic window (1–2 mm) or controlled light guide
- Minimal air gap (0–1 mm)
- Matte black internal surfaces
- Controlled aperture (~3.5–4 mm near sensor)
- Optional countersink geometry
Hoomanely Context
At Hoomanely, building reliable interaction systems means designing beyond electronics. This proximity sensor challenge reinforced a key philosophy:
👉 Real-world reliability comes from system-level thinking
By integrating mechanical design, optical behavior, and sensor logic, the final system behaves consistently across environments—something pure electrical tuning alone could never achieve.
Conclusion
Proximity sensing seems simple—until the enclosure closes around it. What works perfectly in open air can fail silently inside a product due to unseen optical interactions.
The lesson is clear: design the light path, not just the electronics.
Once the optical environment is controlled, the sensor becomes stable, predictable, and reliable. Until then, it remains a source of noise and frustration.
Designing with ToF sensors is not about choosing the right module—it’s about shaping how light behaves inside your product.