Designing Hardware That Knows When Something Is Missing

Most embedded systems are designed around what should be present.
Sensors, modules, peripherals — all assumed to be connected, powered, and behaving correctly.
But real systems don’t live in ideal conditions.
- A connector may not be fully seated
- A sensor board may be missing in a modular setup
- A cable may fail intermittently
- A peripheral may power up late
- A field repair may leave something disconnected
And when this happens, most systems don’t fail clearly.
They fail silently.
At Hoomanely, we design systems differently.
We assume that things will be missing at some point, and the hardware must know that — not guess, not wait for firmware to figure it out, but know it deterministically.
Because a system that knows what is missing behaves very differently from one that assumes everything is fine.
The Real Problem: Assumption-Based Hardware
Traditional hardware design assumes presence.
If a sensor is connected:
- firmware reads data
- system behaves correctly
If it’s not:
- firmware times out
- retries begin
- system state becomes unclear
This leads to:
- delayed fault detection
- unnecessary power consumption
- noisy logs
- inconsistent behaviour across units
- complex firmware handling for edge cases
The system spends time trying to figure out reality.
That’s the inefficiency.
At Hoomanely, we shift that responsibility:
hardware should establish presence first — firmware should not have to guess it.
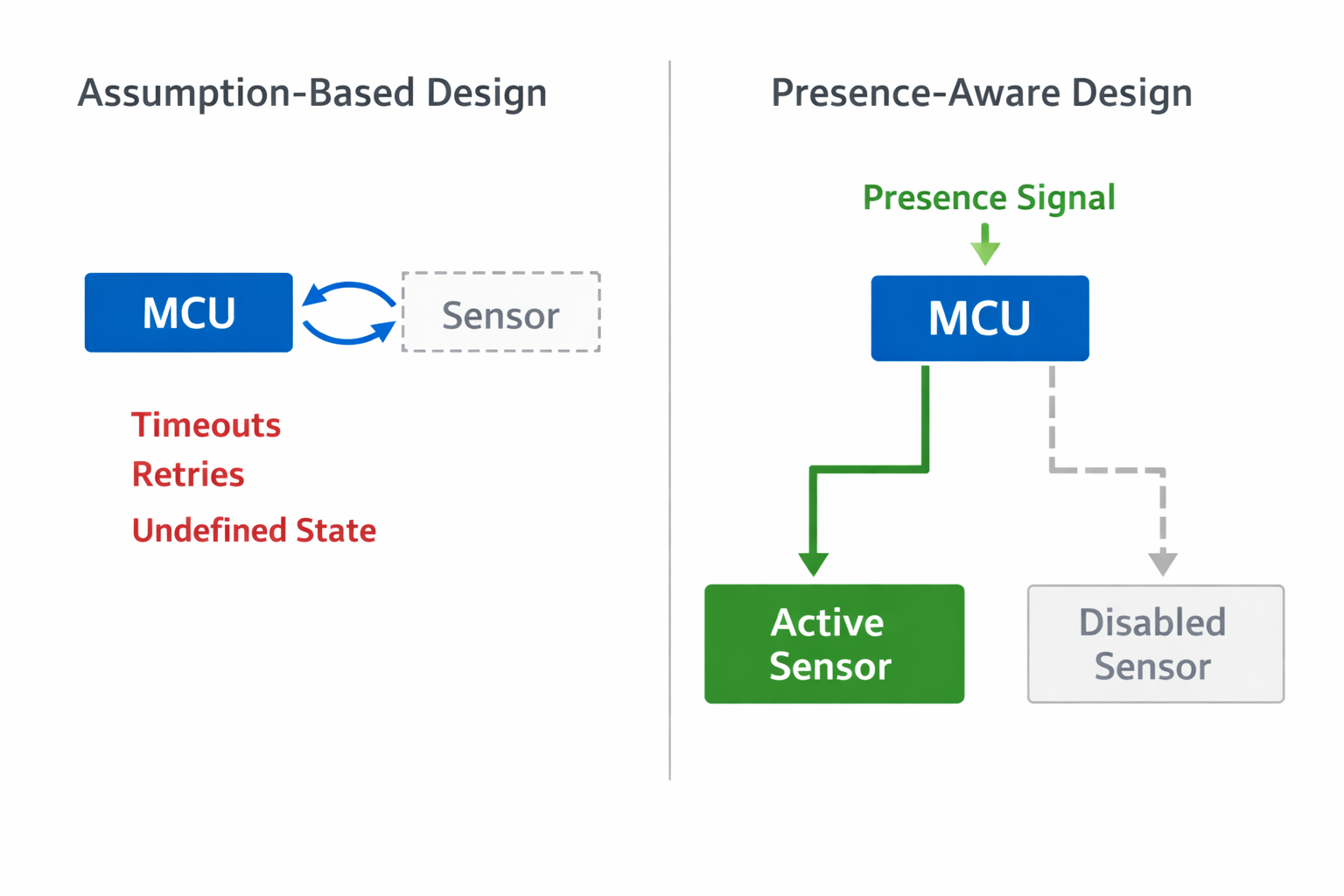
Presence Detection Is a Hardware Responsibility
Instead of relying on communication failures to detect absence, we design explicit presence signals.
This can be done through:
- dedicated detect pins
- resistor identification networks
- power-good feedback
- enable acknowledgment lines
- controlled pull states
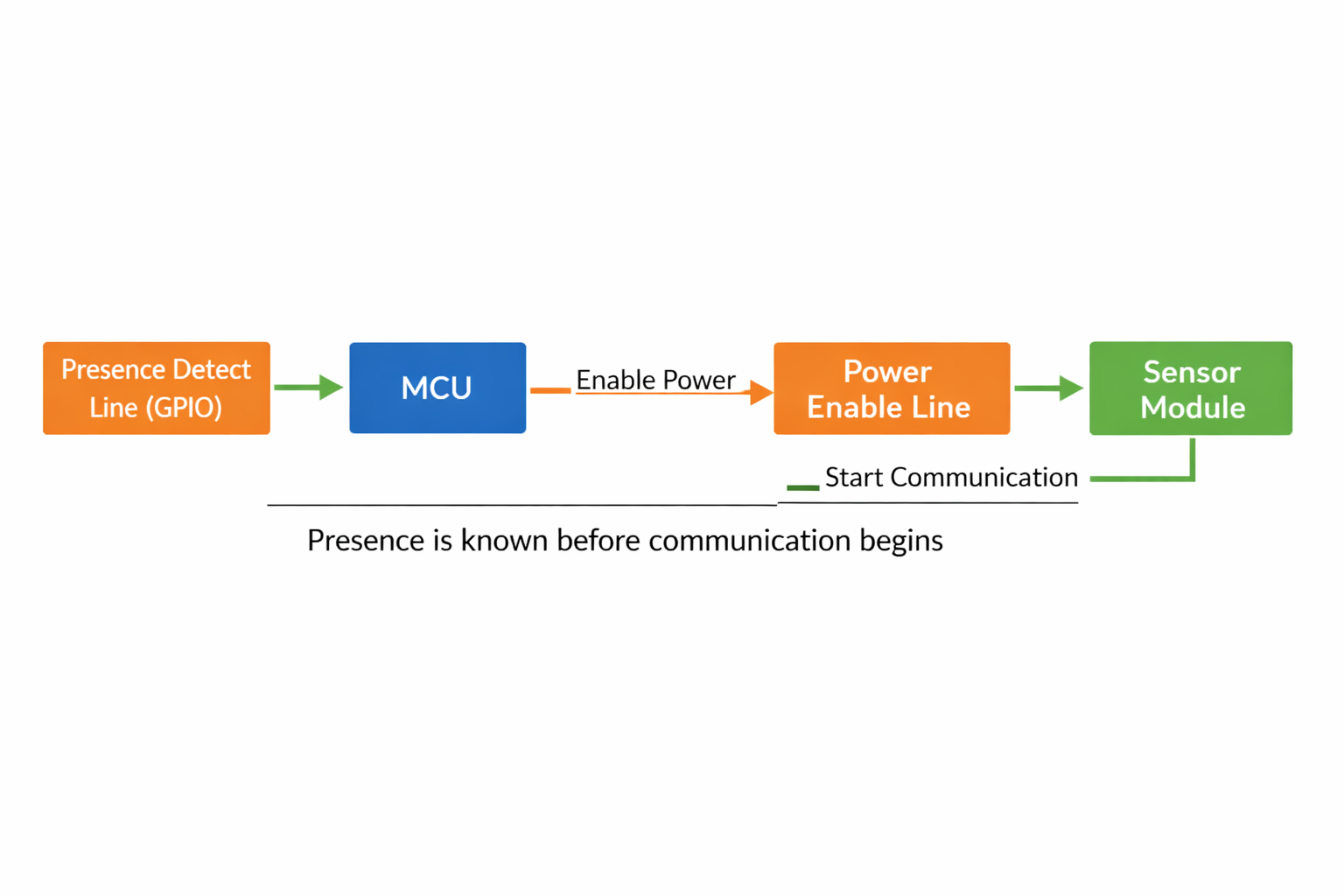
The key idea is simple:
Before any communication starts, the system should already know what is connected.
This allows:
- conditional power enable
- selective initialization
- predictable system states
- faster bring-up
Presence detection is not an add-on.
It is part of the interface contract.
Designing Connectors That Communicate Presence
In modular systems, connectors are more than signal carriers.
They are identity points.
A well-designed connector can tell the system:
- whether a module is connected
- what type of module it is
- whether it is correctly seated
This is achieved by:
- reserving pins for detection
- using known pull-up or pull-down configurations
- encoding module identity through resistor values
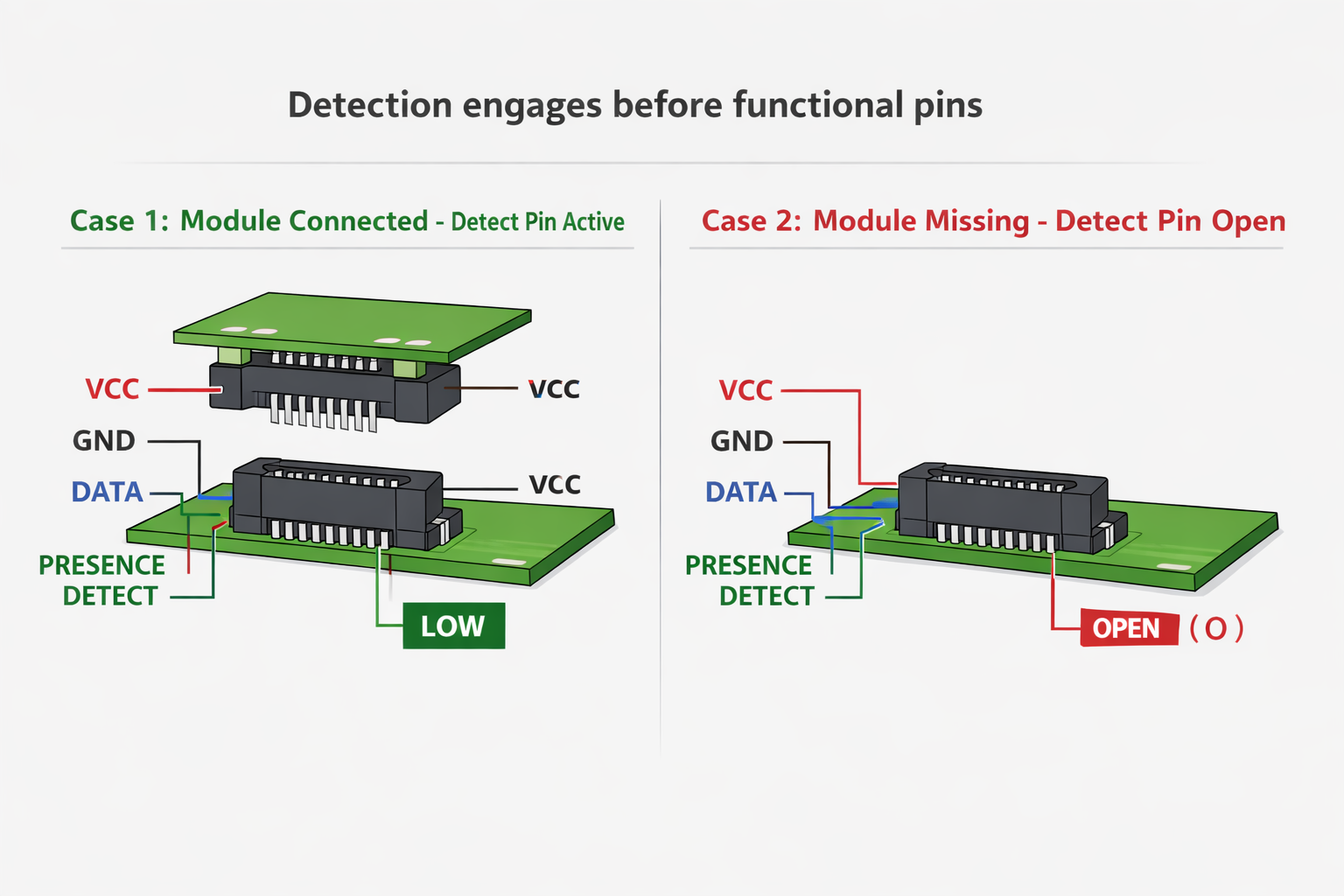
- ensuring detection pins make contact before main signals
This last point is critical.
If presence detection comes after signal connection, the system may briefly enter an undefined state.
So we design connectors such that:
presence is established before functionality begins.
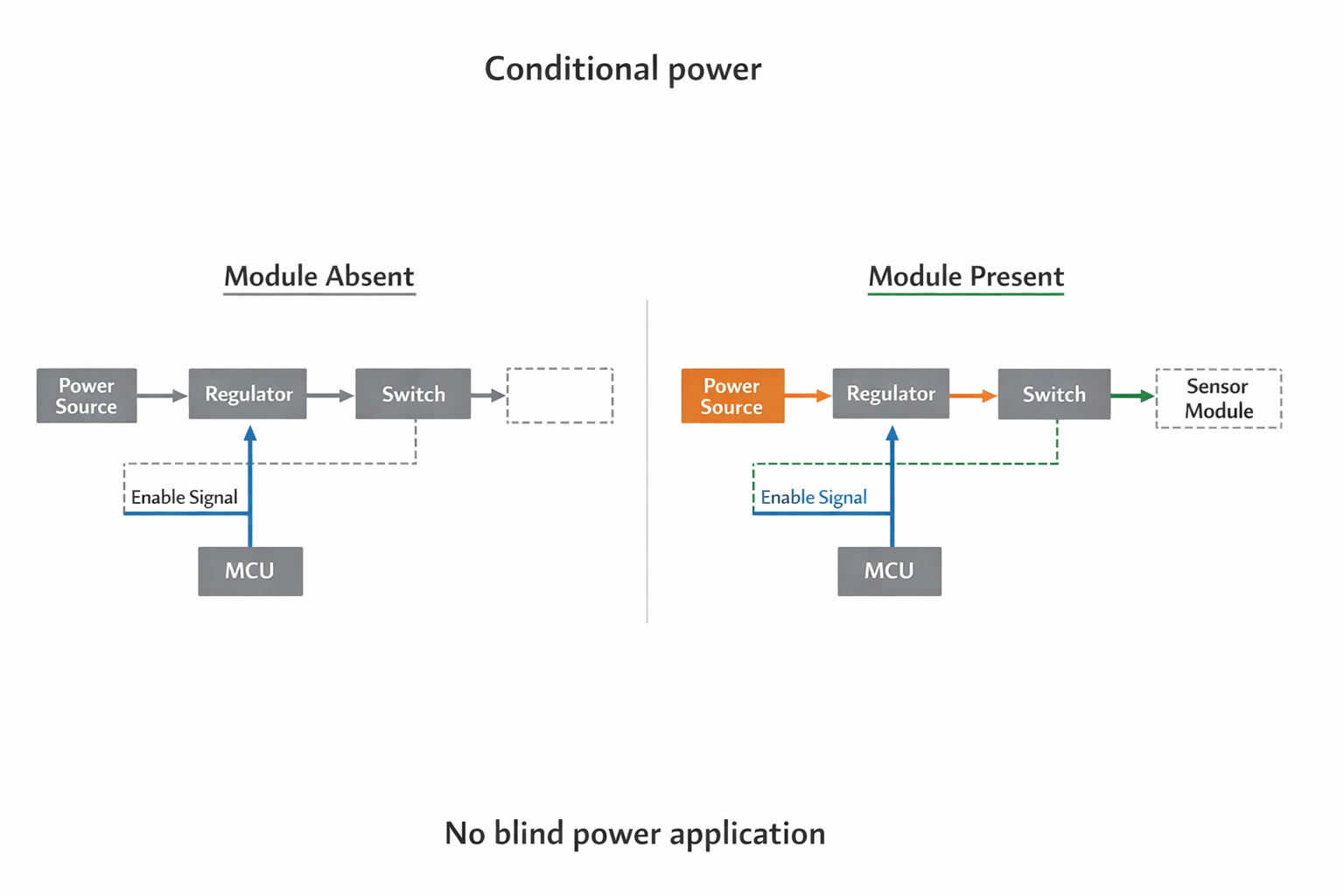
Power Should Not Be Applied Blindly
One of the most common mistakes is powering all subsystems unconditionally.
If a module is missing but still powered:
- floating lines create noise
- unused rails draw leakage current
- regulators operate without load expectations
- signal lines behave unpredictably
Instead, we gate power based on presence.
That means:
- no module → no power rail enable
- detected module → controlled power-up
- absent module → cleanly disabled domain
This improves:
- power efficiency
- signal stability
- system predictability
And most importantly, it prevents the system from interacting with something that isn’t there.
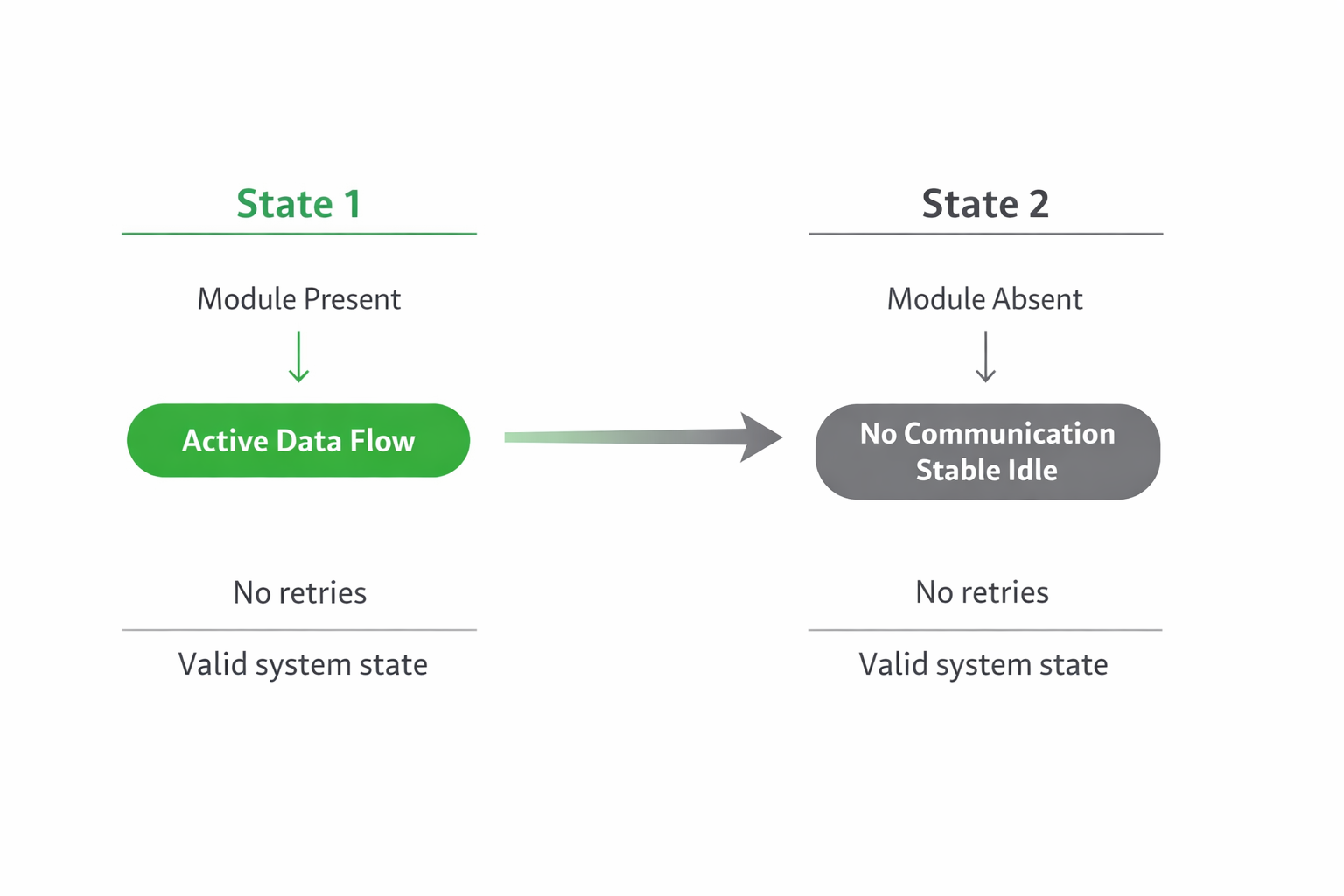
Absence Should Be a Valid State, Not an Error
Many systems treat missing hardware as a fault condition.
That leads to:
- repeated retries
- blocking initialization
- degraded system performance
- unclear error reporting
Instead, we treat absence as a valid state.
If a sensor is not present:
- it is not initialized
- it is not powered
- it is not polled
The system simply adapts.
This makes behavior:
- deterministic
- scalable
- easier to debug
A missing module should not create chaos.
It should create a known state.
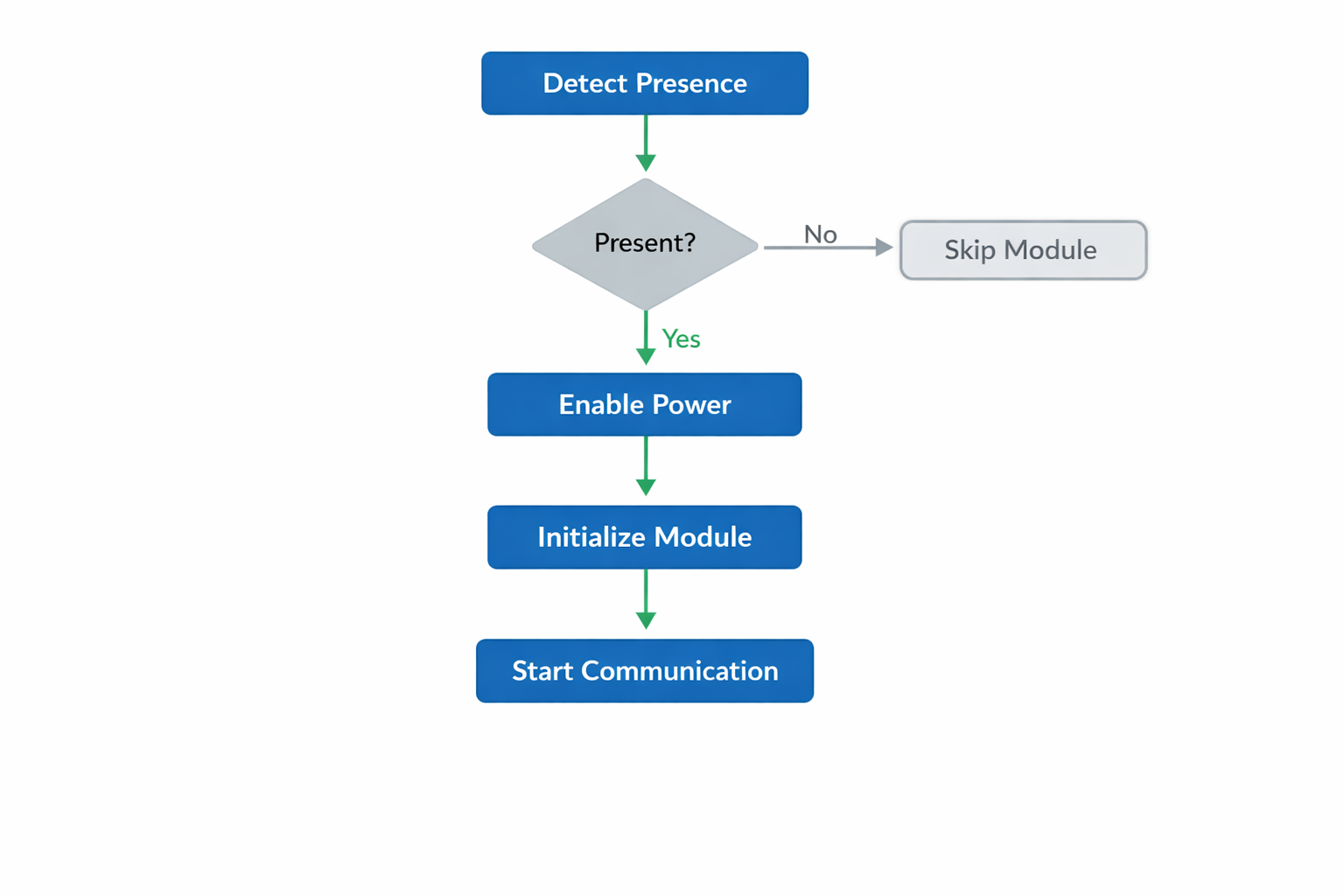
Hardware-Driven Initialization Order
When presence is known early, initialization becomes structured.
Instead of firmware probing blindly:
- hardware reports presence
- power rails are enabled conditionally
- only valid subsystems are initialized
- communication begins only where needed
This eliminates:
- unnecessary bus activity
- failed transactions
- initialization delays
It also improves system boot time because the system does not waste time discovering what is absent.
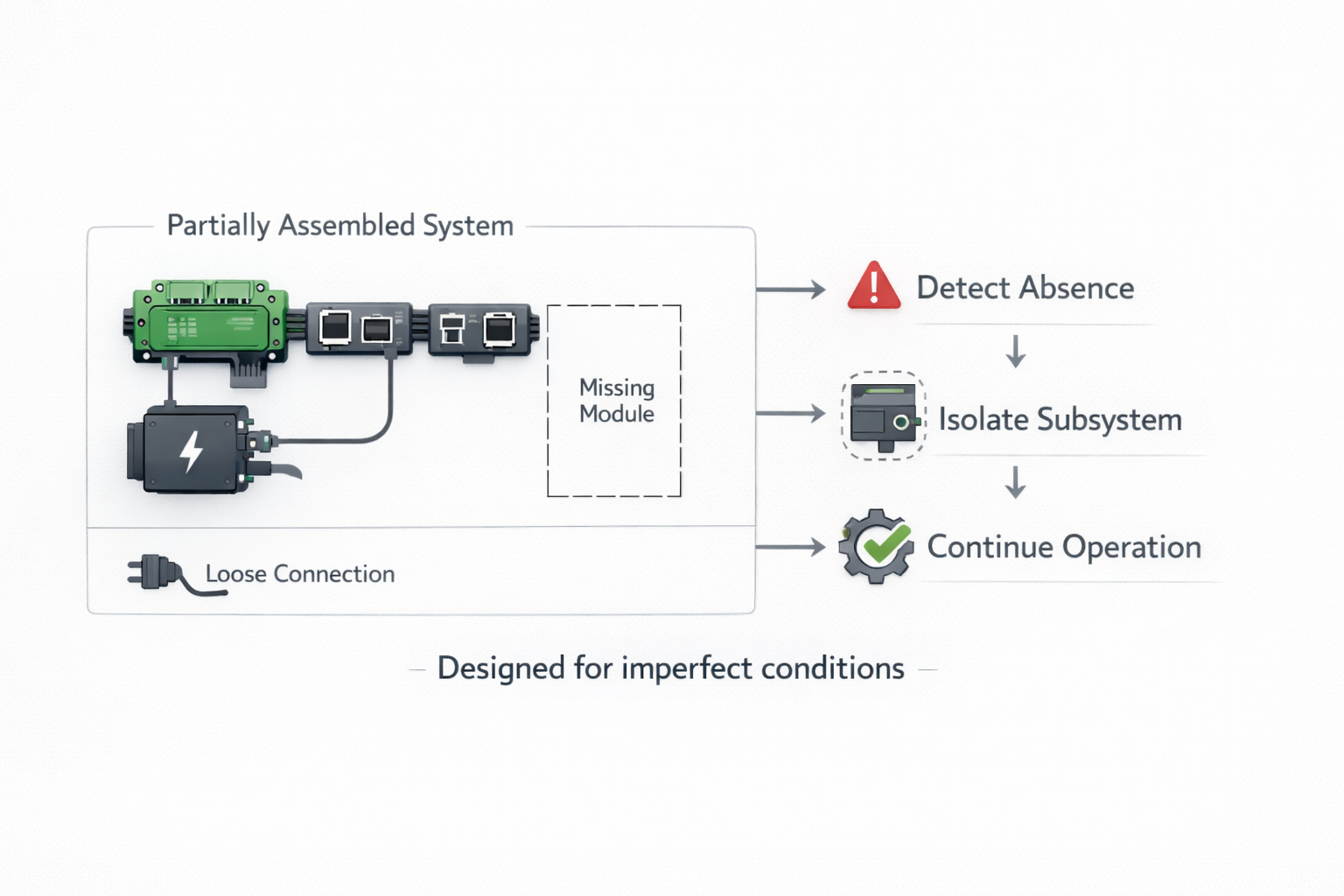
Handling Partial Systems Gracefully
In modular architectures, not all configurations are identical.
Some units may have:
- fewer sensors
- different combinations of modules
- optional peripherals
Without hardware-level presence detection, firmware must handle all permutations dynamically.
That increases complexity.
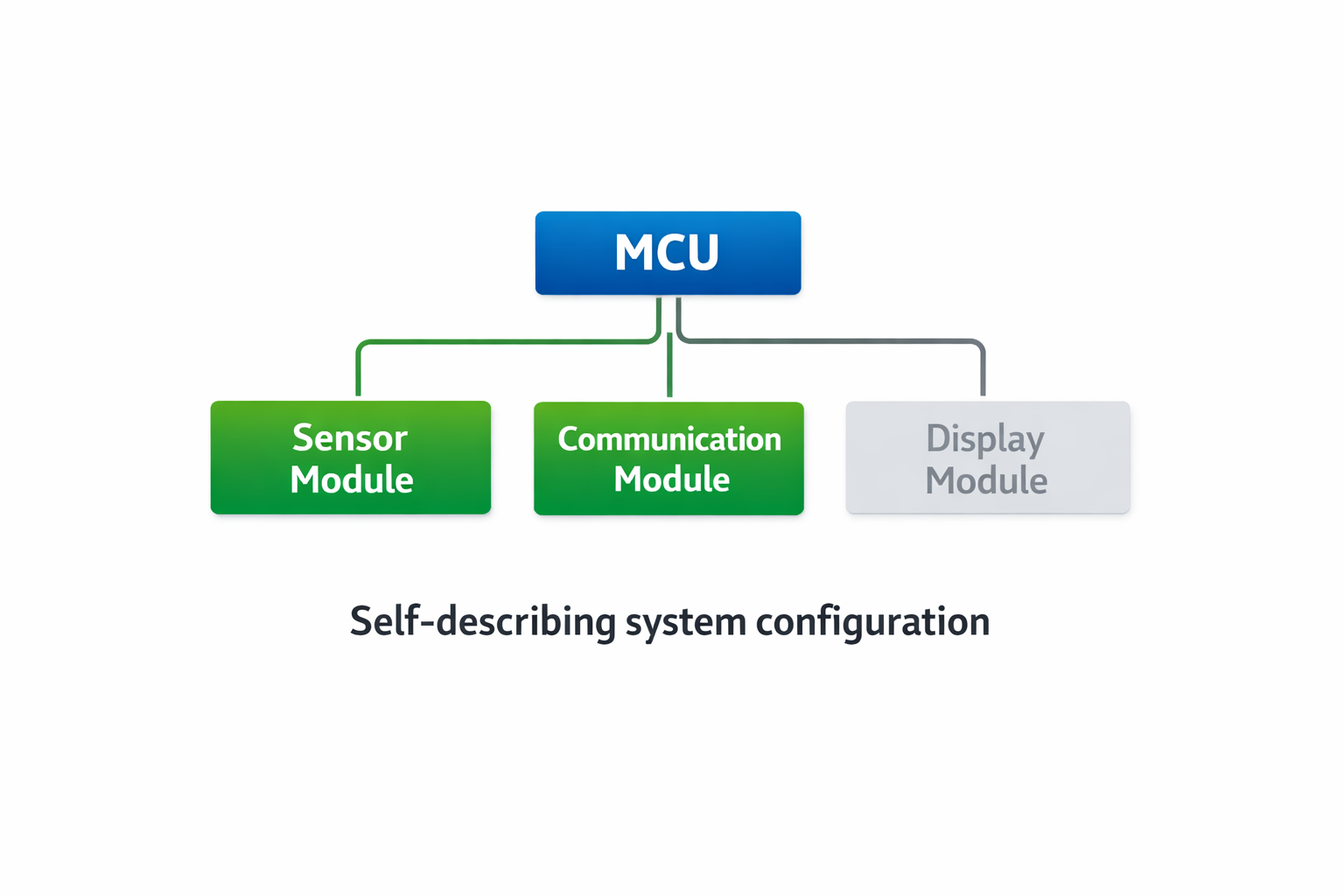
With hardware-driven presence:
- the system self-describes its configuration
- firmware adapts based on known inputs
- no need for trial-and-error probing
This allows the same firmware to scale across multiple product variants without becoming fragile.
Detecting Intermittent Connections
Not all failures are permanent.
Some connections fail intermittently due to:
- loose connectors
- cable fatigue
- vibration
- environmental conditions
If presence is only checked once at boot, these issues go unnoticed.
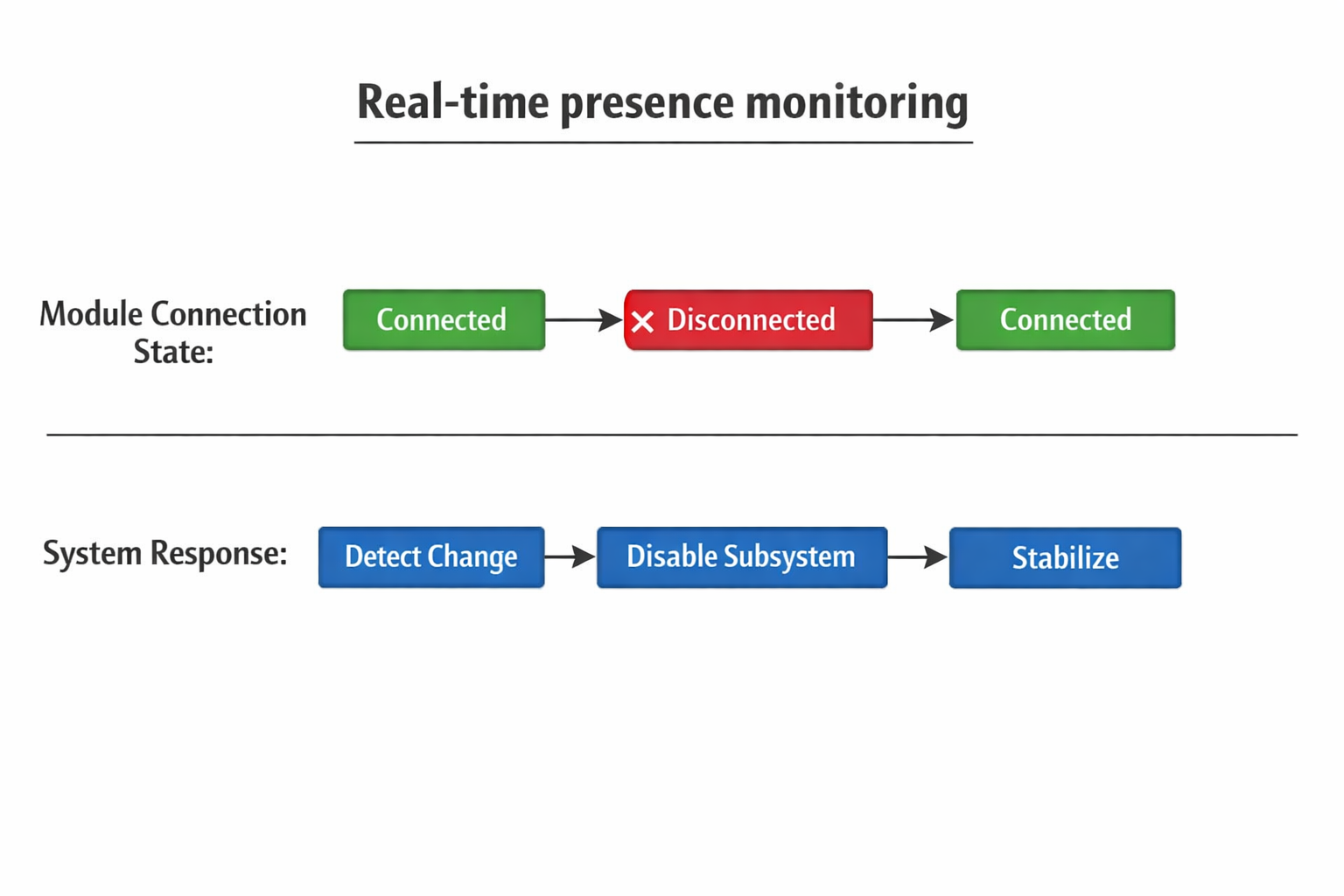
So we design presence detection to be:
- continuously observable
- debounced
- integrated into system state
This allows the system to:
- detect disconnections in real time
- shut down affected subsystems safely
- avoid corrupted data reads
- maintain overall system stability
A system that knows something has disappeared can respond immediately.
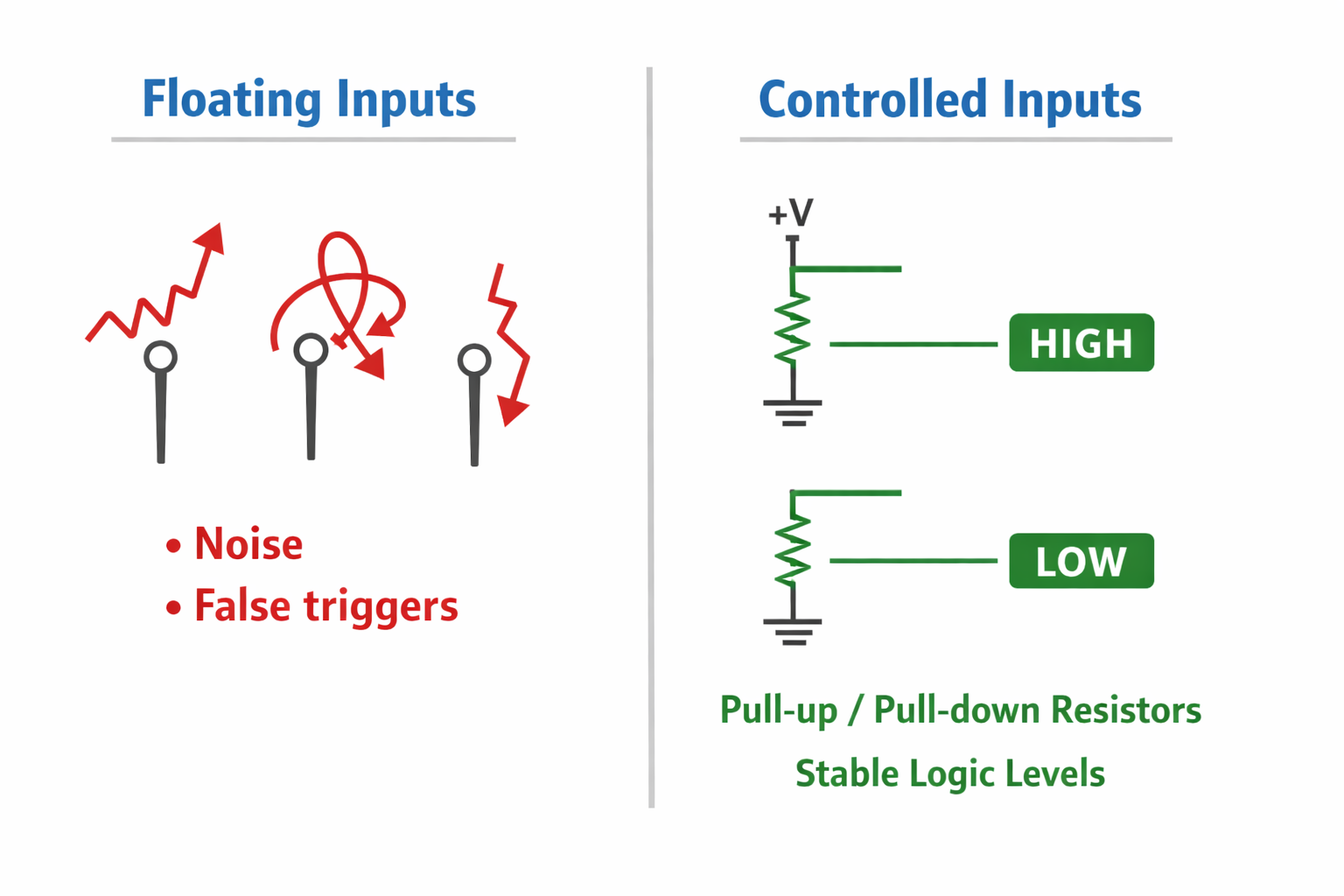
Preventing Ghost Signals and Floating States
When a module is absent but signal lines are still active, the system may see:
- random logic levels
- false triggers
- unstable readings
- undefined bus states
This is especially dangerous in shared buses like I²C or SPI.
To prevent this, we ensure:
- proper pull states on unused lines
- isolation where necessary
- no floating inputs
- no active drivers without confirmed presence
This keeps the system electrically stable even when parts of it are missing.
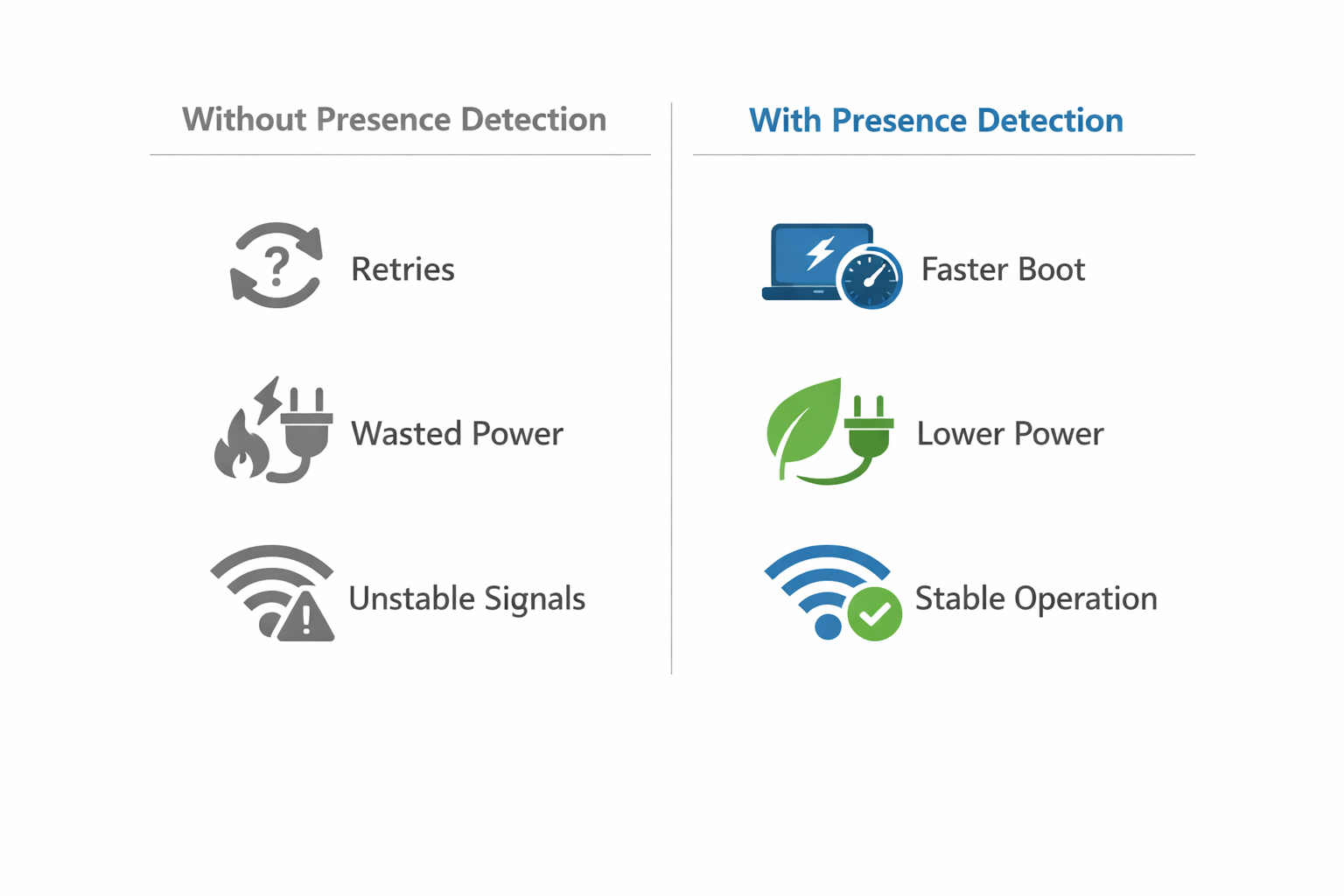
Practical Improvements We Observed
After implementing hardware-driven presence detection, we saw clear improvements:
Faster Boot Time
Systems skipped unnecessary initialization, reducing startup delays.
Lower Power Consumption
Inactive modules were never powered, reducing idle current.
Reduced Firmware Complexity
No need for repeated probing or fallback logic.
Improved Stability
No interaction with floating or undefined signals.
Better Field Reliability
Systems behaved predictably even with missing or partially connected modules.
Cleaner Debugging
Engineers could immediately identify what was present and what was not.
These improvements came not from adding more features, but from removing uncertainty.
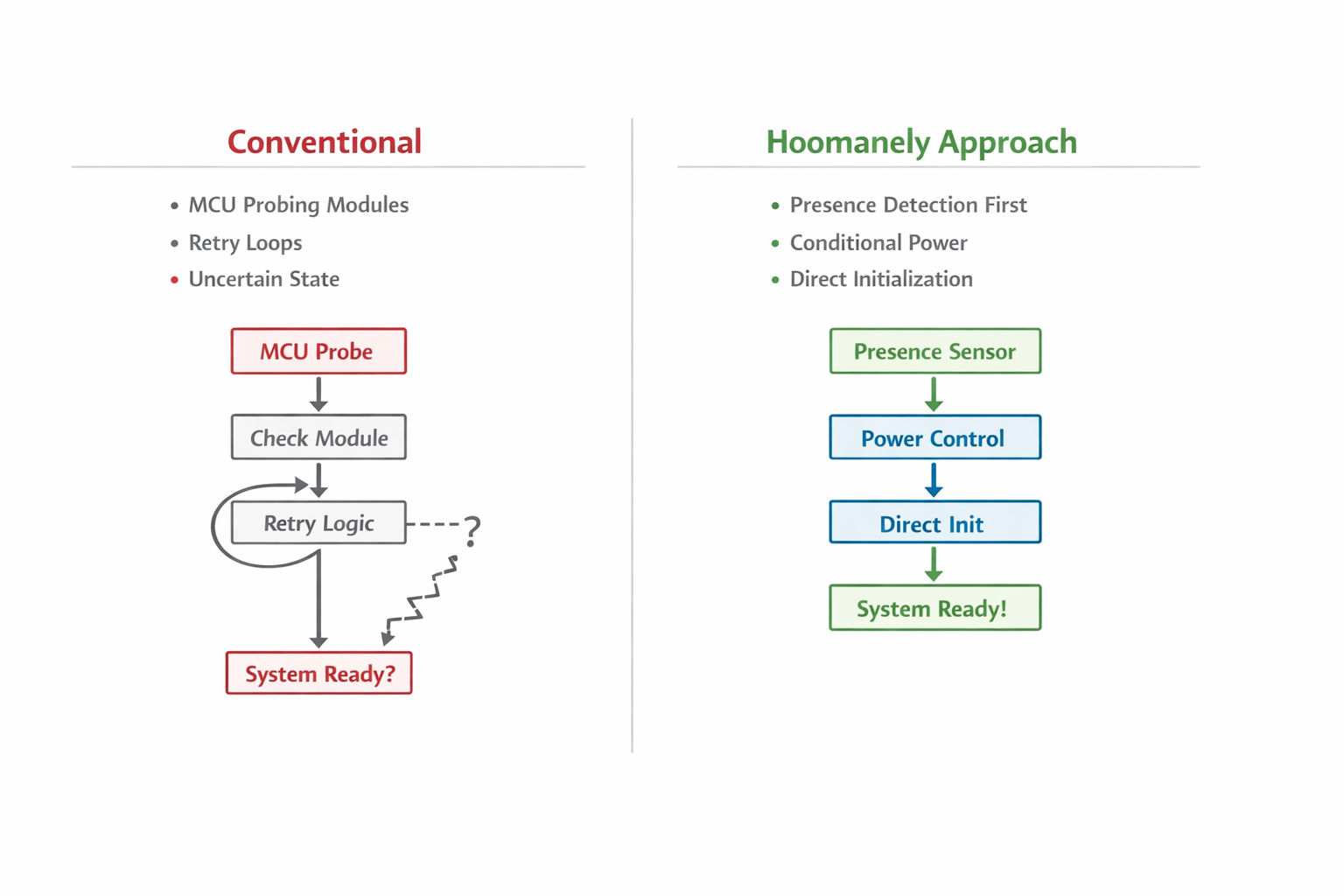
Conventional vs Structured Approach
Conventional approach:
- assume all modules are present
- detect absence through communication failure
- handle errors in firmware
- retry and recover dynamically
Hoomanely approach:
- detect presence in hardware first
- gate power and signals accordingly
- initialize only valid subsystems
- treat absence as a defined state
The difference is subtle in design, but significant in behavior.
Designing for Real-World Conditions
Real-world systems are not static.
They are:
- assembled imperfectly
- handled by different users
- exposed to wear and tear
- repaired under non-ideal conditions
So the hardware must:
- tolerate missing modules
- detect incorrect configurations
- adapt without failure
- remain stable under partial operation
This is not about edge cases.
This is about designing for reality.
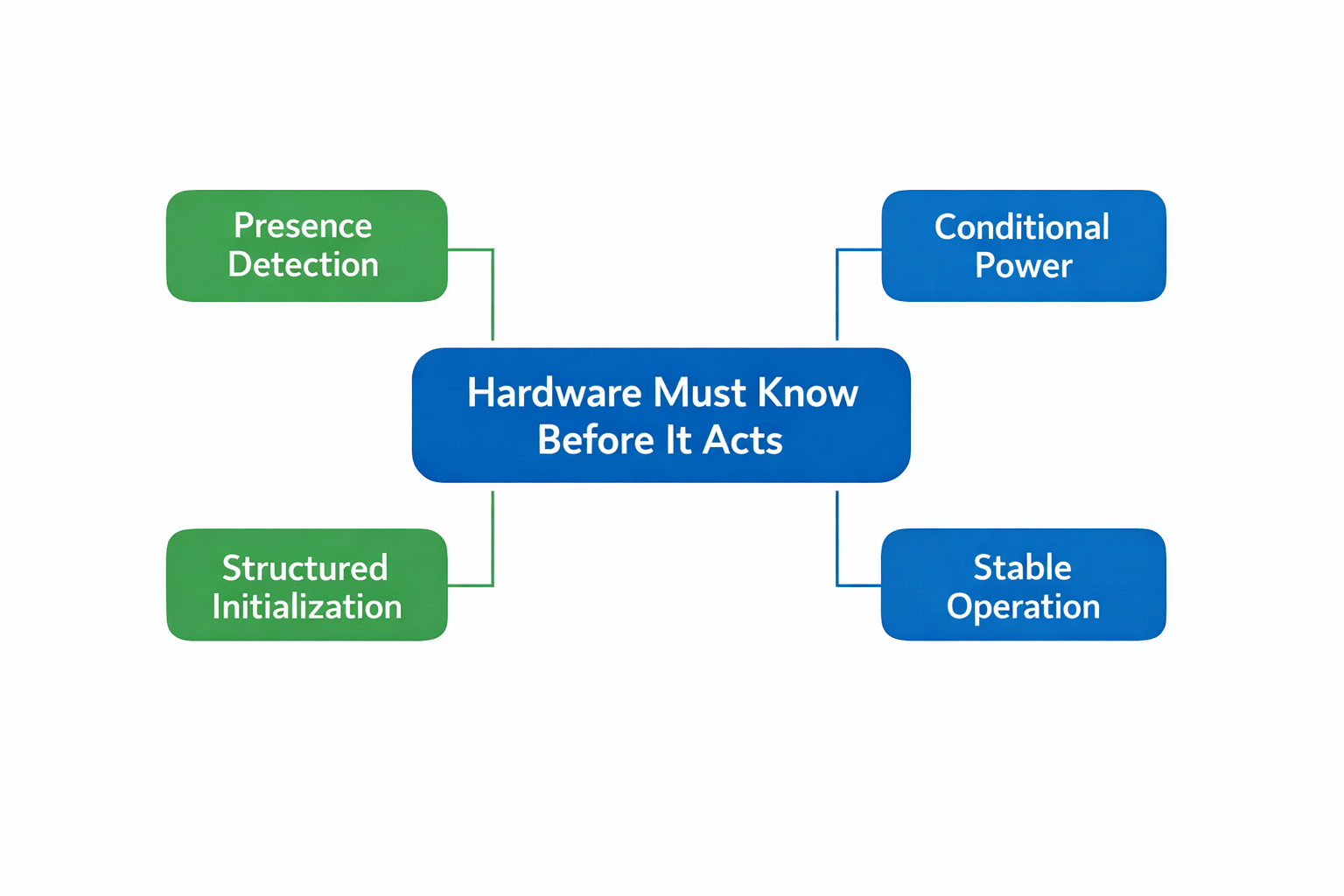
The Core Principle
A system should never need to guess what is connected.
It should know it before it acts.
That means:
- presence detection is explicit
- power is conditional
- initialization is structured
- absence is valid
When this principle is followed, systems become:
- more predictable
- easier to debug
- more scalable
- more robust in the field
Final Thought
Most hardware is designed to work when everything is perfect.
But real products succeed when things are not.
Designing hardware that knows when something is missing is not about handling failure.
It is about eliminating uncertainty.
Because once the system knows what is present — and what is not — every decision that follows becomes simpler, cleaner, and more reliable.
And that is what turns a working design into a dependable product.