FTDI Boot Path Design: Brick-Proofing the Hardware Fleet
Introduction: Designing for the Inevitable
Every embedded system eventually faces the same reality: firmware must evolve. Features expand, bugs are fixed, security updates roll out, and manufacturing configurations change. In that constant state of motion, the true measure of a hardware platform is not whether it can be programmed once—but whether it can always be recovered.
At Hoomanely, we design products that operate continuously in real-world environments, often deployed at scale. For such systems, a bricked device is not a technical inconvenience—it is an operational liability. Preventing that outcome requires more than careful firmware; it requires intentional boot-path design.
This is where the FTDI-based boot path becomes foundational. By integrating FTDI chips directly into our programming and debug architecture, we create a predictable, resilient, and production-friendly path into every device. The result is a fleet that remains accessible throughout its lifecycle—during development, manufacturing, field updates, and service.
This article explores how FTDI boot paths contribute to brick-proofing, why they simplify system setup compared to traditional approaches, and how they scale cleanly across the vBus ecosystem.
Boot Paths as System Infrastructure
More Than a Programming Convenience
In many products, the boot interface is treated as a temporary development artefact—something useful on early prototypes and quietly removed or deprioritised later. We take the opposite view.
A boot path is system infrastructure. It defines:
- How reliably a device can be programmed
- How predictably it can be recovered
- How safely firmware can evolve over time
- How scalable production and servicing workflows become
By designing the boot path as a permanent, well-defined interface, we ensure that no device ever becomes opaque to us—regardless of its firmware state.
Why FTDI Fits the Problem Space
Deterministic Access Over Clever Abstractions
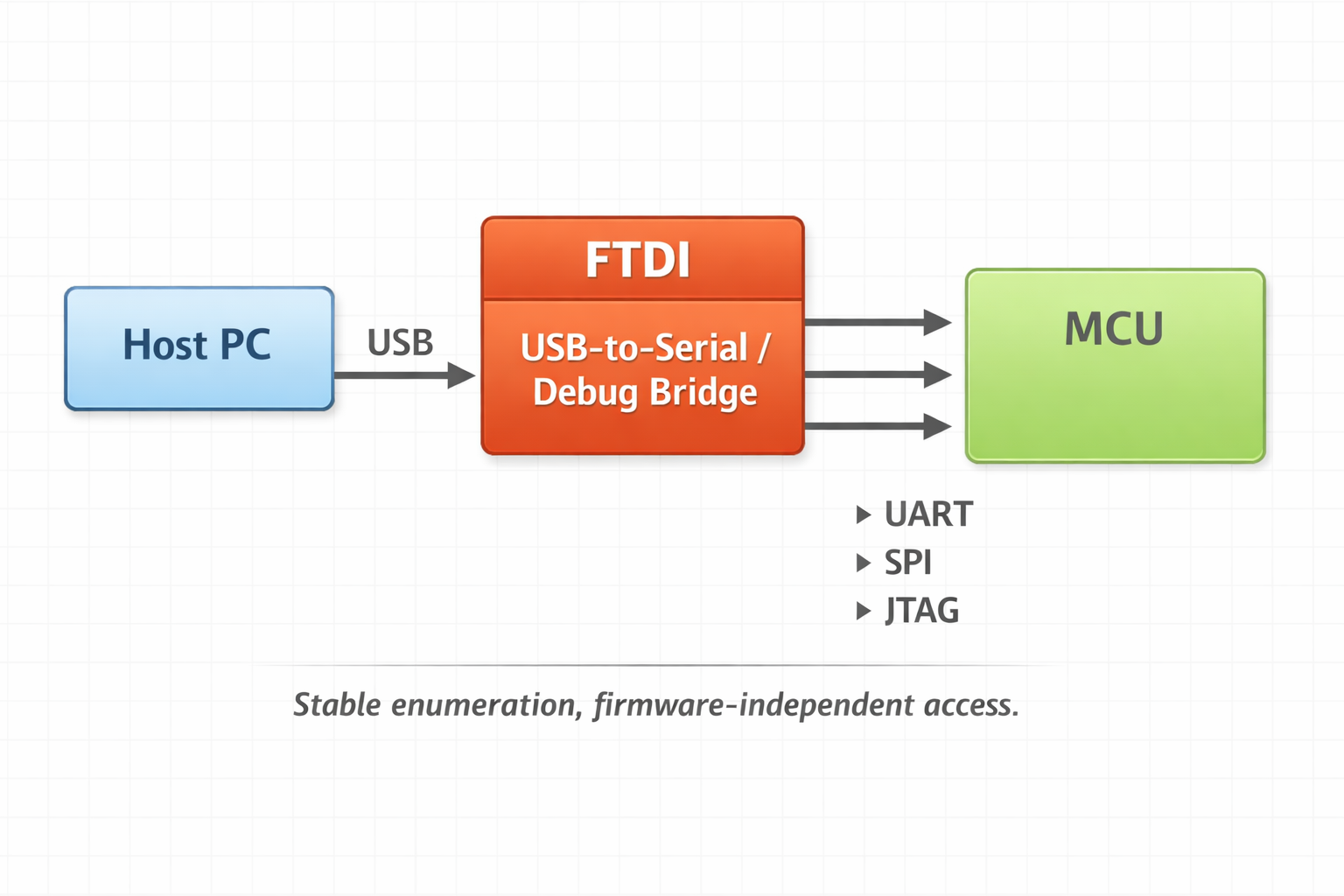
FTDI devices offer a unique combination of characteristics that align well with robust boot-path design:
- Stable USB enumeration across platforms
- Deterministic UART, SPI, or JTAG bridging
- Minimal dependency on target firmware state
- Strong driver maturity across operating systems
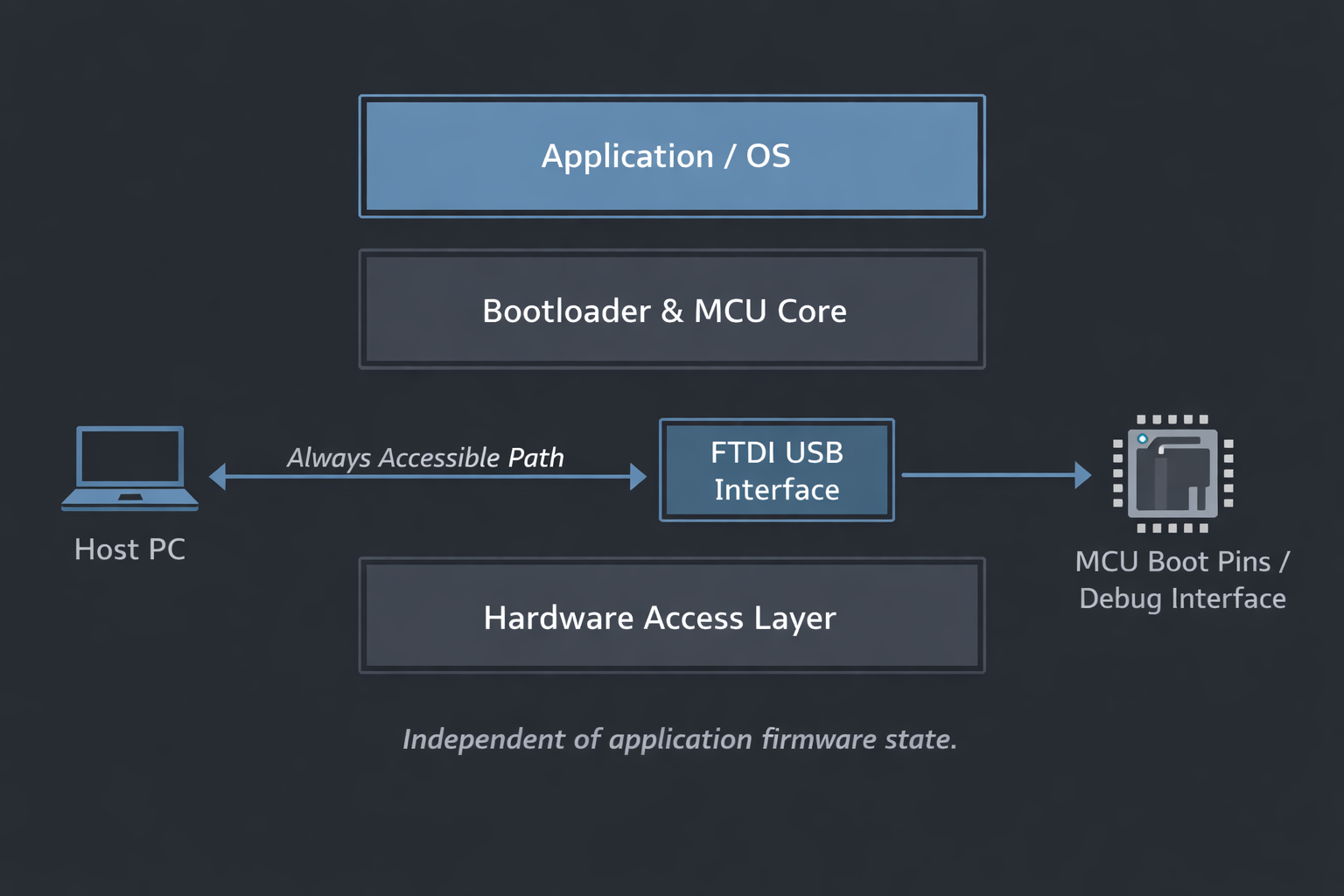
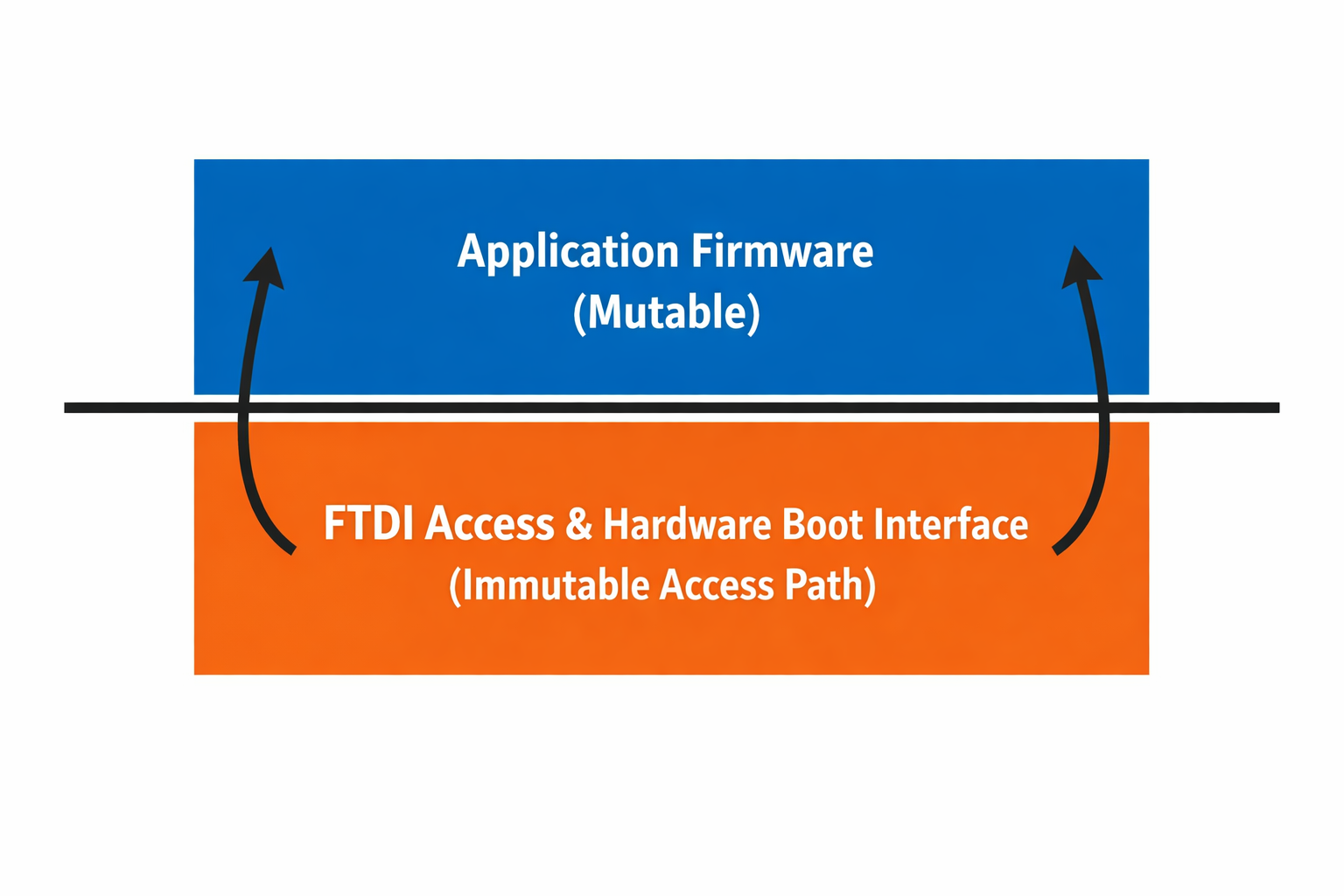
Critically, an FTDI-based path does not require the application firmware to be functional. As long as the hardware is electrically alive, the system remains reachable.
This separation between device accessibility and device software state is the cornerstone of brick-proofing.
Brick-Proofing as a Design Objective
What “Brick-Proof” Actually Means
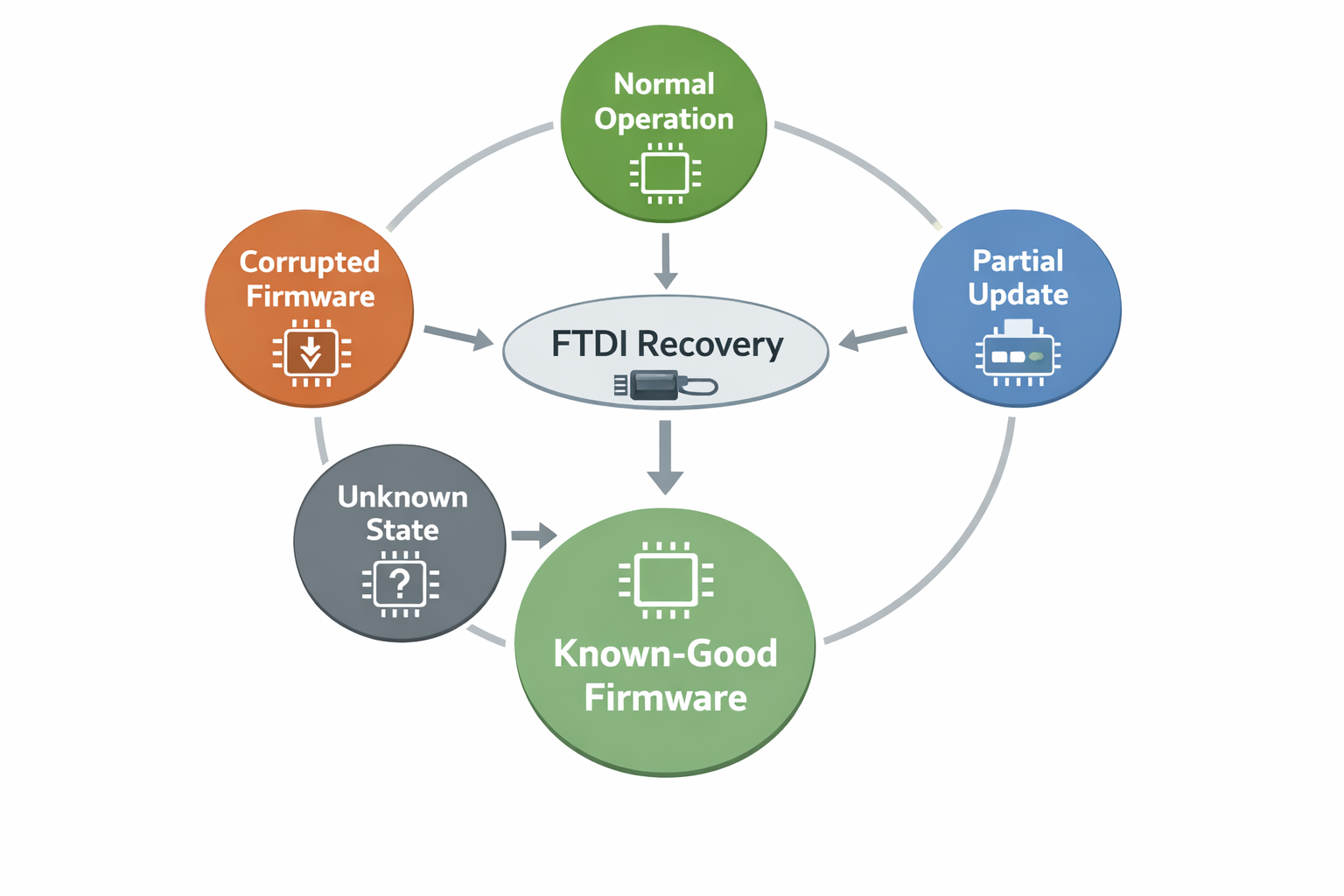
Brick-proofing is not about avoiding mistakes—it is about ensuring recovery is always possible.
In practice, this means:
- A guaranteed path to reprogram the system even if the application firmware is corrupted
- A boot interface that does not depend on GPIO strapping rituals or timing-sensitive sequences
- A mechanism that works consistently across development benches and production lines
FTDI boot paths allow us to treat recovery as a normal operation rather than an exception.
Simplifying the Boot Experience
From Fragile Sequences to Predictable States
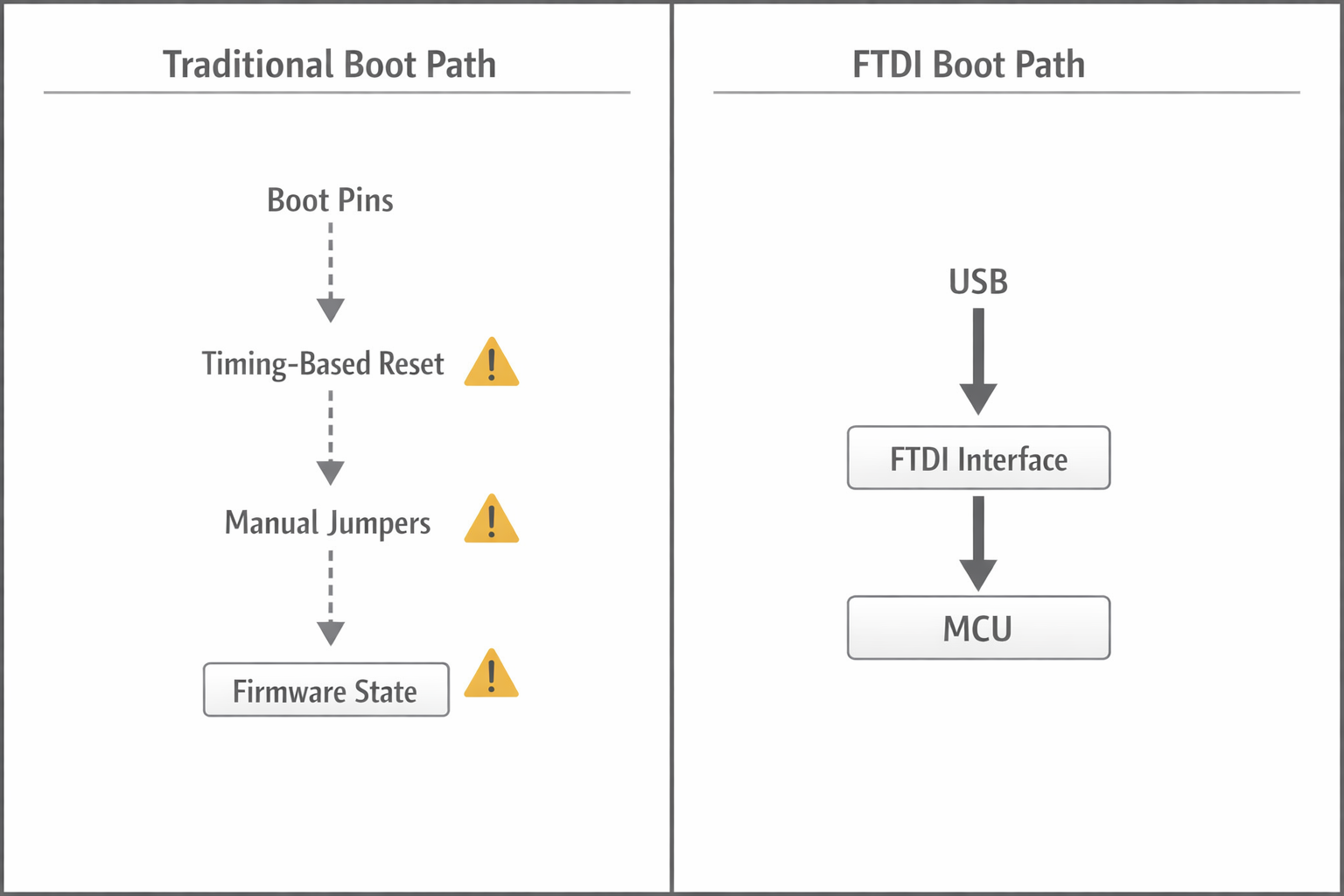
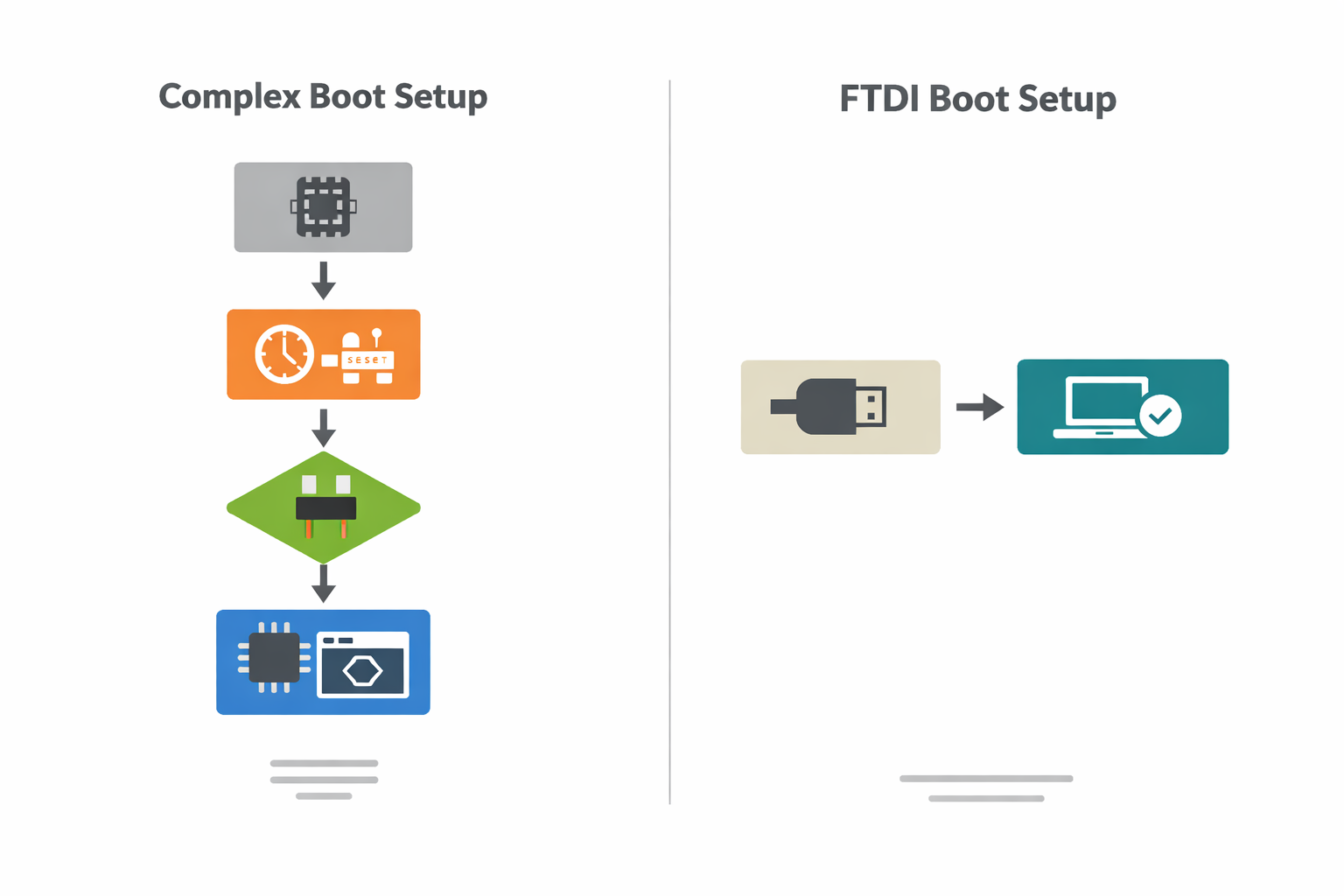
Traditional boot setups often rely on combinations of:
- Boot pins that must be held in specific states
- Reset timing dependencies
- Manual intervention during power cycles
- Toolchains that vary between development and production
While functional, these approaches introduce variability—especially when scaled.
An FTDI-based boot path collapses this complexity into a single, stable interface. The host system establishes communication, asserts control, and interacts with the target deterministically. The same process applies whether the board is on a developer’s desk or on a manufacturing jig.
This predictability is what makes the setup simpler—not fewer features, but fewer assumptions.
Production-Grade Programming by Design
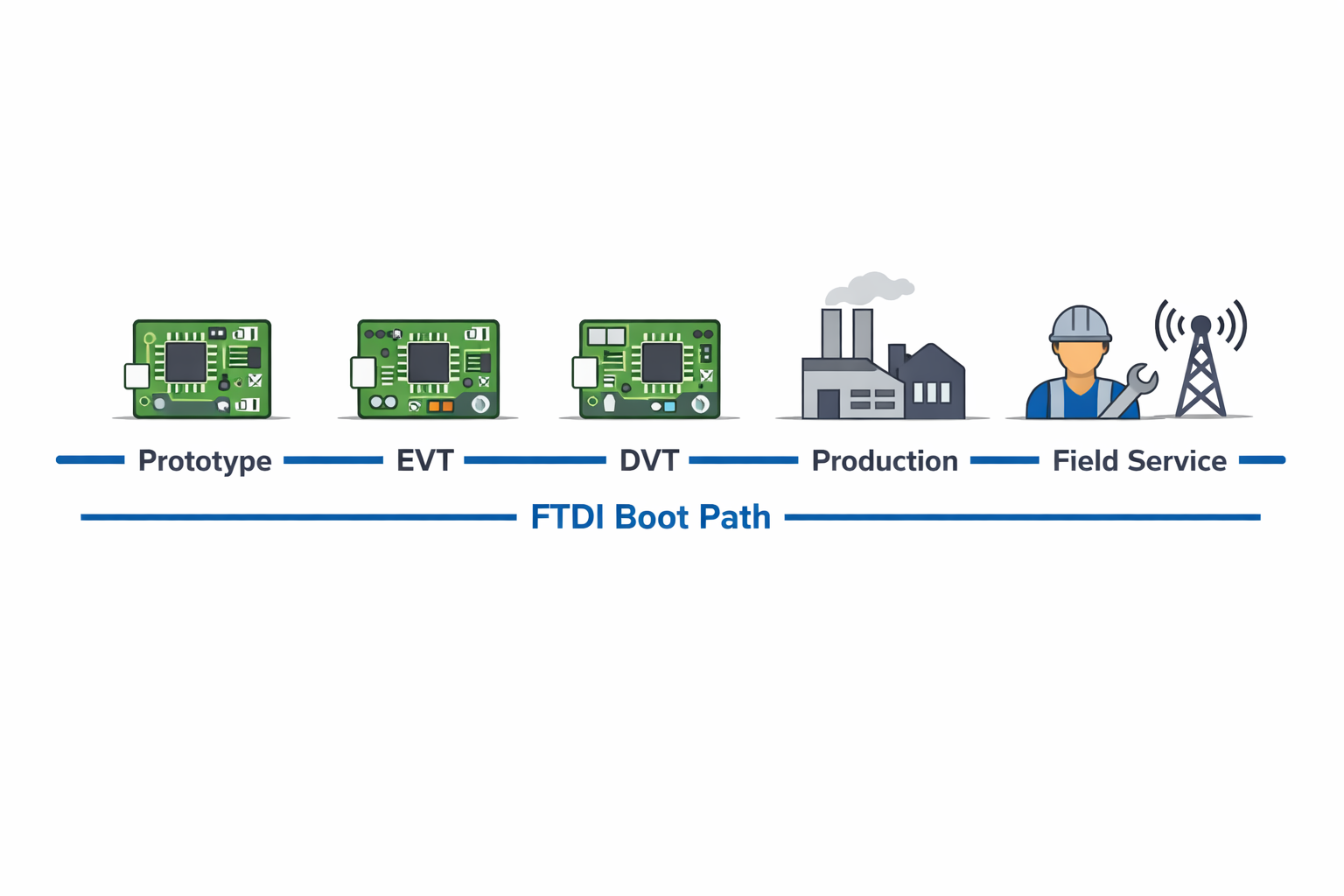
One Path from First Prototype to Final Unit
One of the strengths of the FTDI boot approach is continuity. The interface used during early development is the same interface used during:
- EVT and DVT builds
- Production flashing
- Quality assurance verification
- Service and refurbishment
There is no need to introduce alternate programming paths later in the lifecycle. That consistency eliminates entire classes of production-only issues and reduces procedural branching in documentation and tooling.
For vBus-based products, this also means that module programming remains uniform across carriers and configurations.
Fleet Safety at Scale
Recovery Is a Fleet Property, Not a Device Feature
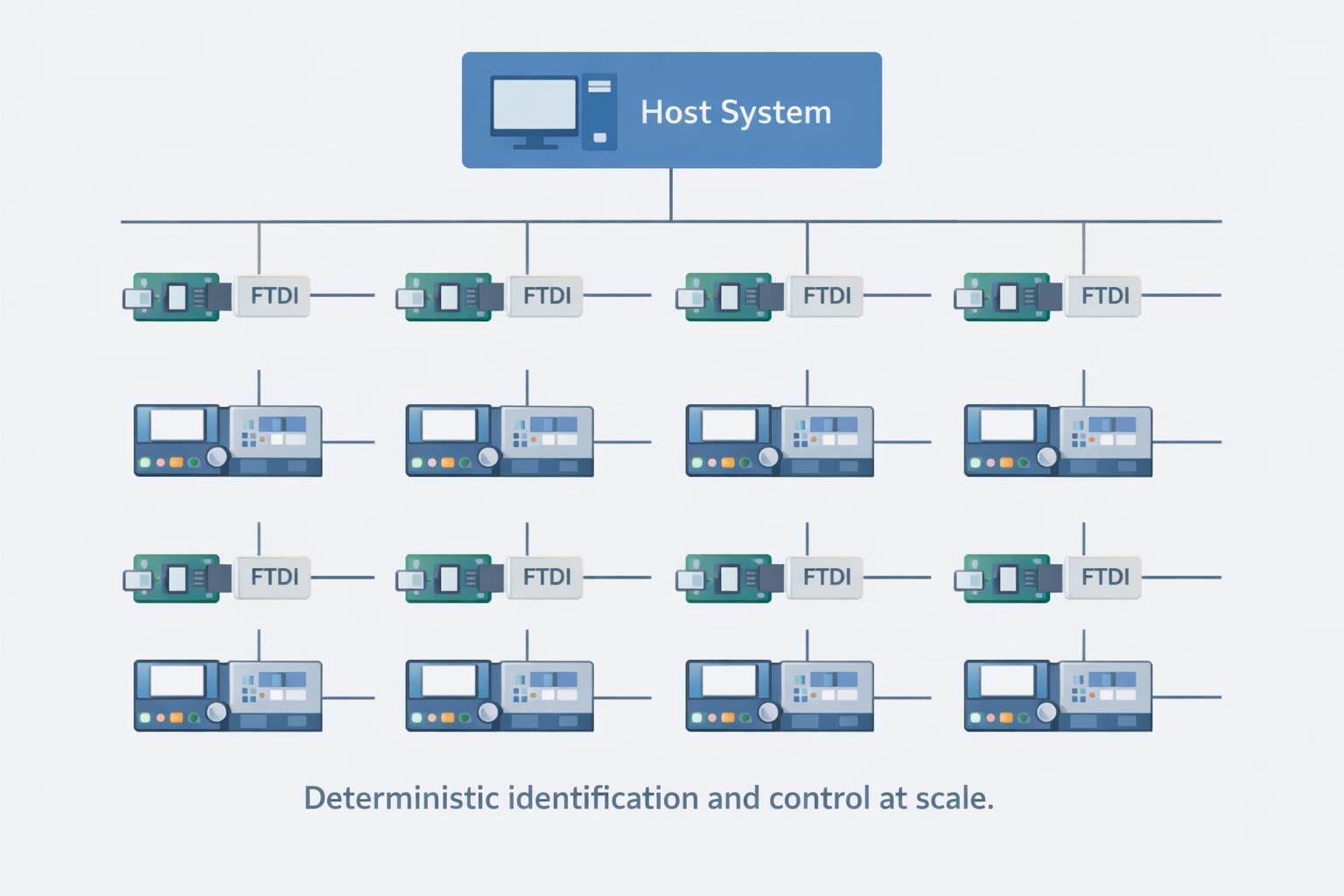
When products are deployed in volume, the unit of concern shifts from individual devices to the fleet as a whole. In that context, recovery capability must be universal, repeatable, and automation-friendly.
FTDI boot paths support this model naturally:
- Devices enumerate in predictable ways
- Serial numbers enable deterministic identification
- Automated tooling can interact with units without human intervention
This makes large-scale operations—like provisioning, updates, or audits—reliable rather than risky.
Isolation from Application Risk
Keeping the Door Open
A key advantage of FTDI-based boot paths is architectural isolation. The programming interface exists outside the application execution domain. No matter what state the application firmware is in, the boot path remains intact.
This separation allows firmware teams to move faster and experiment more confidently. Features can be iterated, bootloaders can evolve, and system behavior can be refined—without ever threatening recoverability.
That confidence translates directly into development velocity.
Clean Integration into the vBus Ecosystem
Modular Systems Need Modular Access
The vBus architecture emphasizes modularity at every level—electrical, mechanical, and logical. Boot paths are no exception.
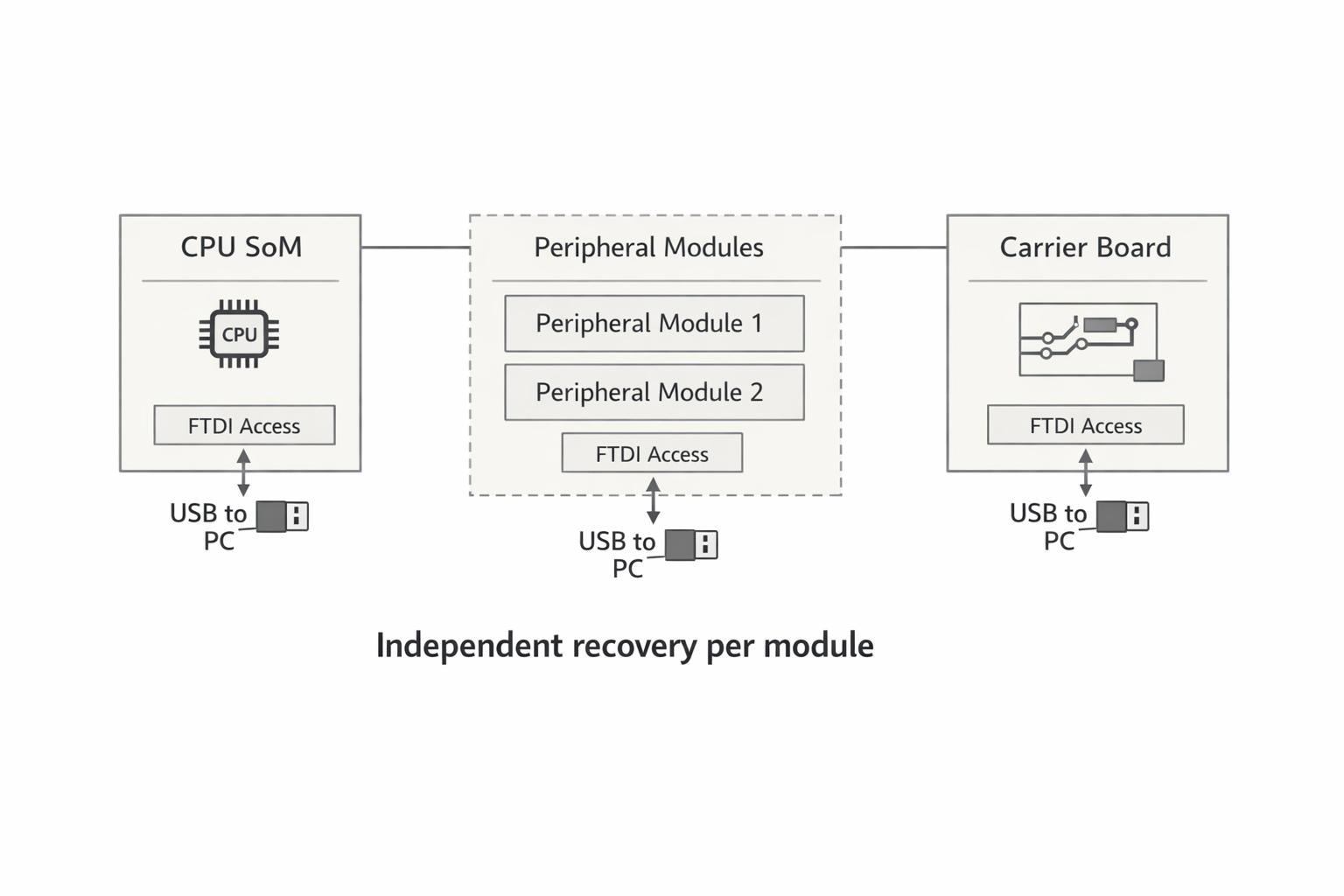
By standardizing FTDI-based access across modules, we ensure that:
- CPU SoMs remain independently programmable
- Peripheral modules can be brought up or validated in isolation
- Carrier boards do not become single points of failure
Each module retains its own clear path back to a known-good state, reinforcing the resilience of the overall system.
Designing for Humans and Machines
Dual-Mode Accessibility
Another often overlooked advantage of FTDI boot paths is how well they serve both human engineers and automated systems.
- Engineers benefit from straightforward, familiar interfaces
- Manufacturing systems benefit from deterministic enumeration and control
- Service workflows benefit from minimal training requirements
The same interface supports all three contexts without compromise. That universality is a hallmark of good system design.
Long-Term Maintainability
Products That Age Gracefully
As products age, environments change. Operating systems update, tooling evolves, and institutional knowledge shifts. Interfaces that depend on fragile assumptions rarely survive these transitions intact.
FTDI-based paths, by contrast, age well. Their stability and ubiquity ensure that devices remain accessible years after deployment. That longevity is not accidental—it is a direct result of choosing boring, reliable infrastructure over clever shortcuts.
Conclusion: Confidence Through Accessibility
FTDI boot path design is not about convenience—it is about confidence. Confidence that devices can always be reached. Confidence that firmware evolution does not endanger recoverability. Confidence that production, service, and development all share the same reliable foundation.
By embedding FTDI-based boot paths into our products, Hoomanely ensures that every device remains a participant in its own lifecycle—never sealed off, never irrecoverable, never abandoned due to inaccessible software state.
This is brick-proofing not as a safety net, but as a design philosophy. One where accessibility is intentional, recovery is guaranteed, and system evolution remains unconstrained.
In modern embedded systems, resilience is engineered long before deployment. The boot path is where that engineering begins.



