Managing Power When Multiple Features Turn On at Once
Designing hardware for a single feature turning on is relatively easy. Designing hardware for multiple subsystems waking up together without destabilizing the system is where real embedded power architecture begins.
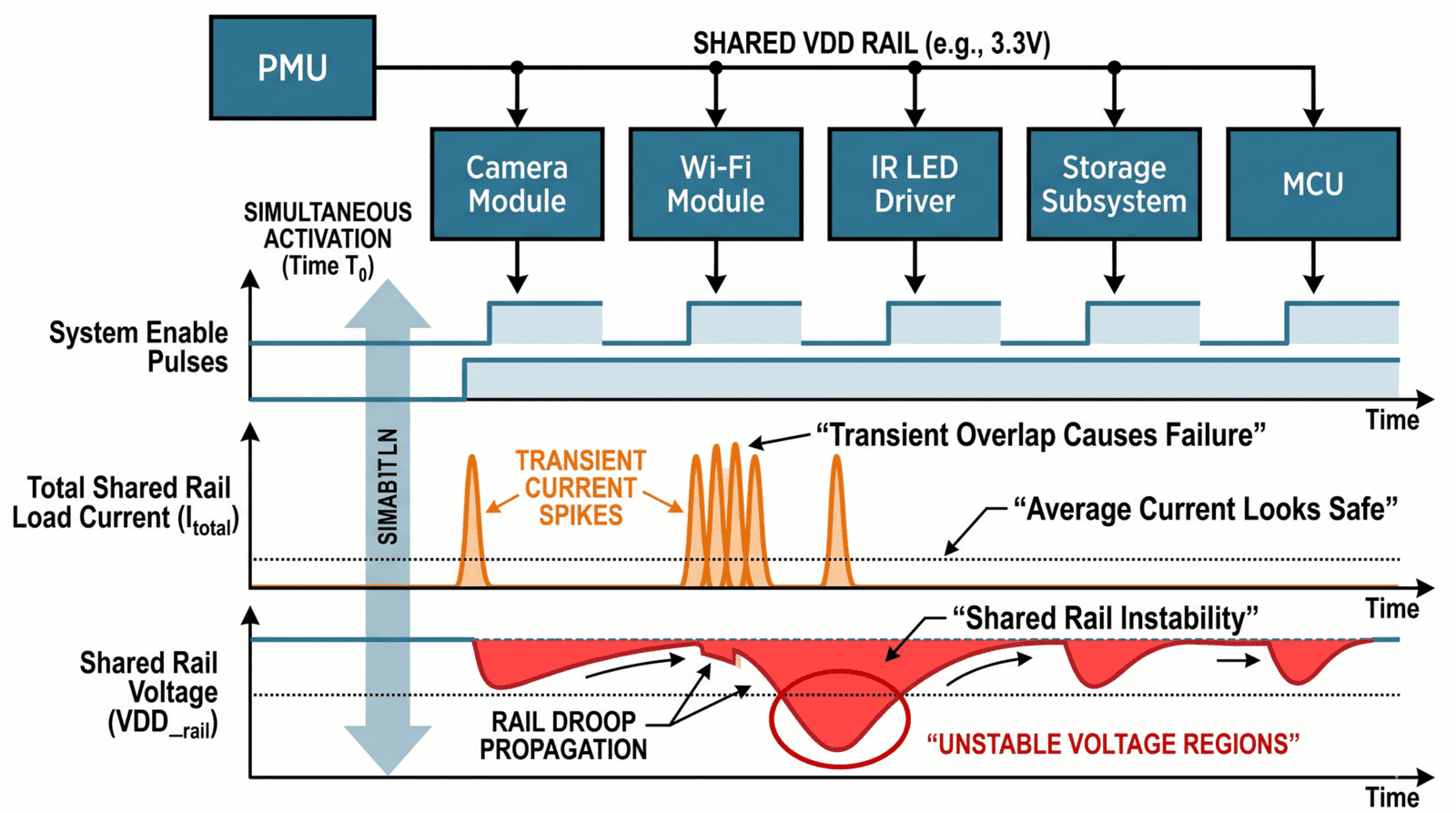
Most embedded products today are no longer simple MCU boards with a few peripherals. A modern edge device may contain image sensors, wireless radios, IR illumination, storage devices, audio pipelines, neural accelerators, Linux compute modules, and multiple always-on monitoring circuits. Individually, each subsystem may look electrically valid. But when several of them activate simultaneously, the combined transient behavior often becomes the actual failure source.
This is one of the less visible challenges in products like EverBowl-class embedded systems. A thermal sensor capture may overlap with camera initialization. An IR LED driver may activate while WiFi reconnects. A compute subsystem may wake from suspend exactly when storage synchronization begins. On paper, the average current budget still looks safe. On the bench, however, rails dip, clocks destabilize, resets occur, and intermittent failures begin appearing during feature overlap conditions instead of isolated subsystem testing. The problem is rarely "insufficient power supply capacity" alone. More often, it's uncontrolled concurrency.
The problem is not average current
A common mistake during bring-up is validating each subsystem independently. The camera works. The WiFi works. The IR LEDs work. The audio codec works. Then integration begins.
Suddenly the MCU resets during camera startup, USB disconnects intermittently, sensor I2C buses hang, CAN communication drops during wireless transmission, or Linux crashes only during certain feature combinations. This happens because electrical systems respond to instantaneous behavior, not spreadsheet averages.
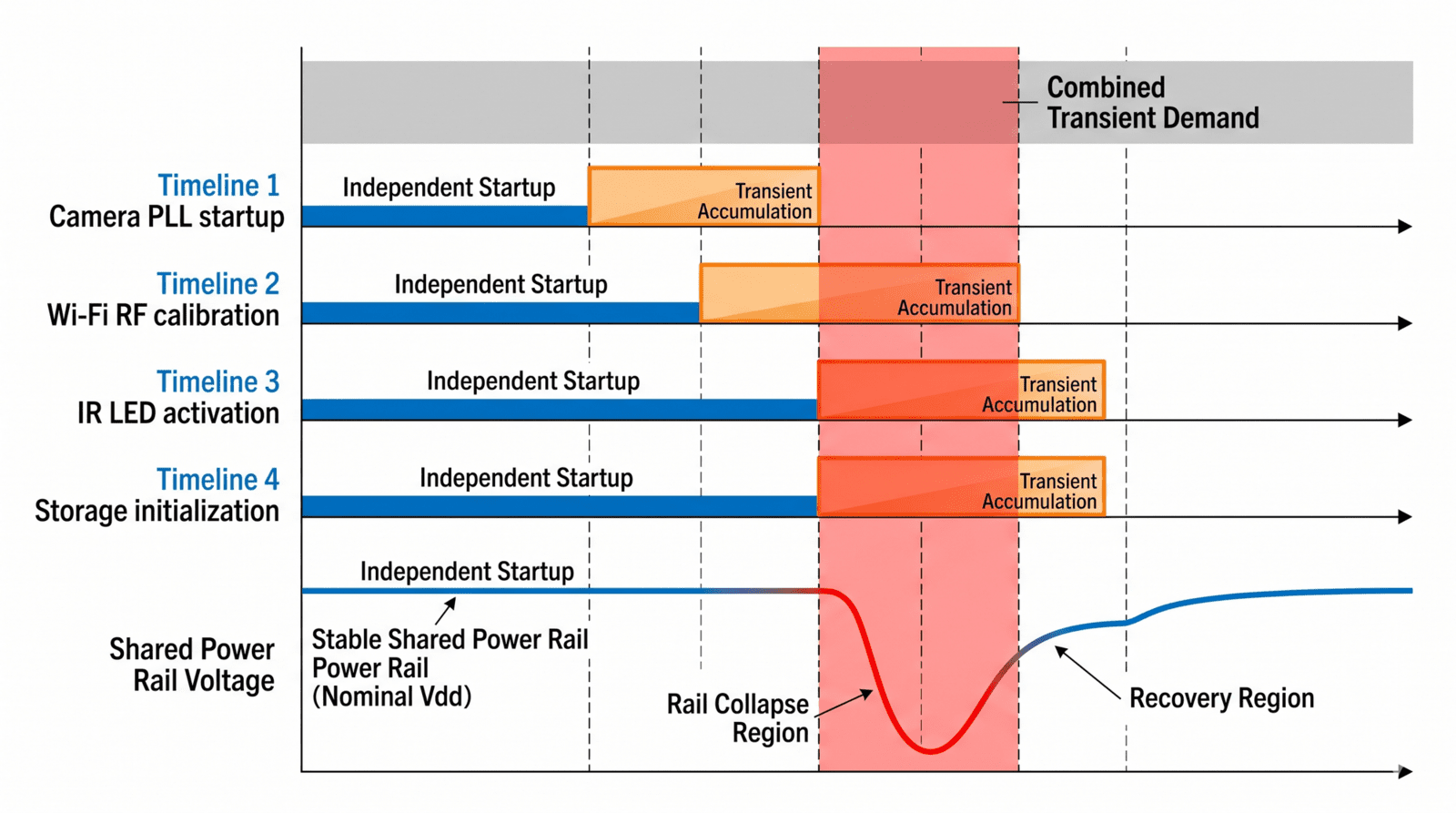
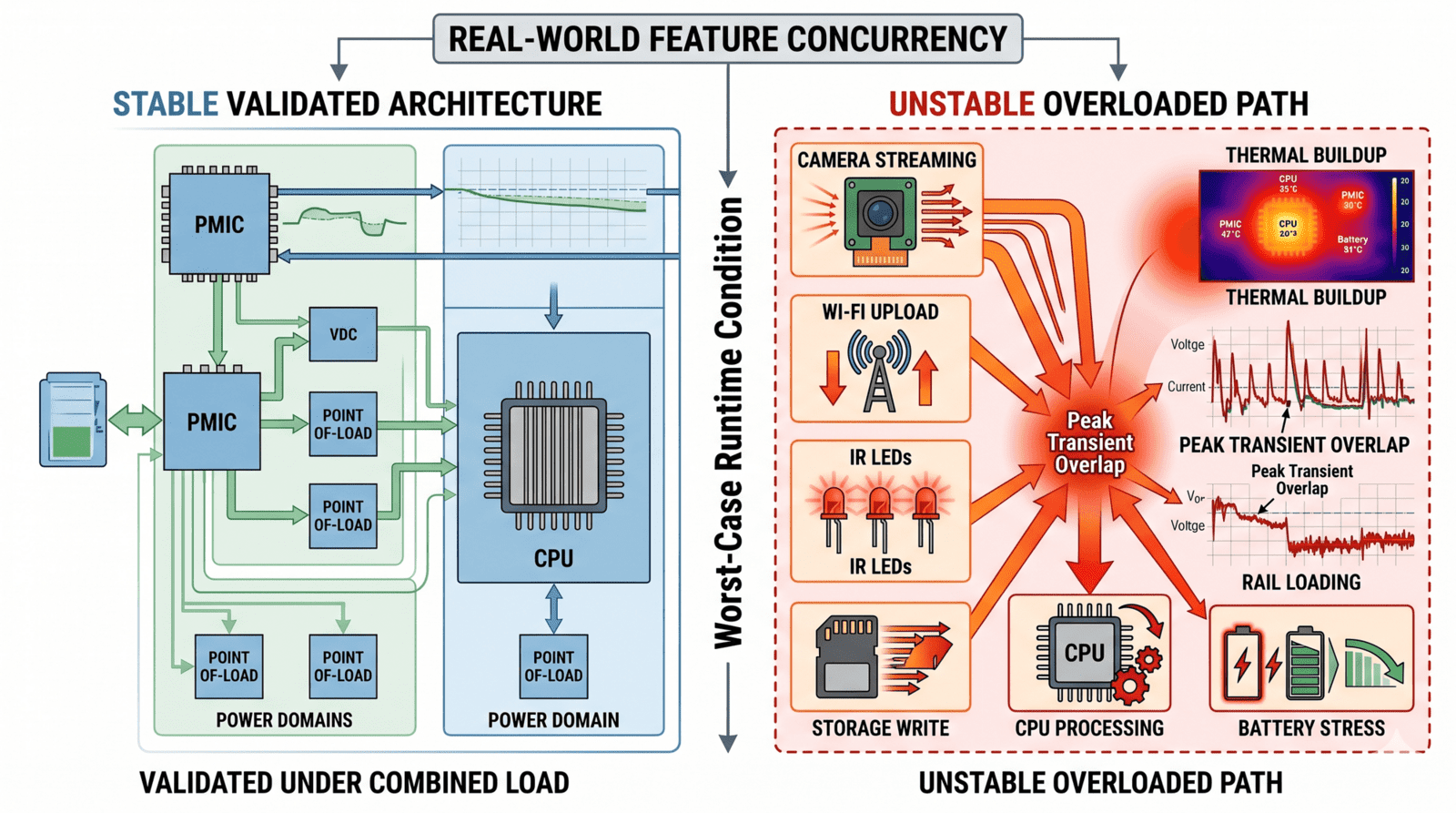
A camera sensor may draw a sharp inrush current during analogue rail startup. A wireless module may generate fast burst loads during transmission calibration. IR LEDs can create large switching transients. Storage devices may momentarily exceed their steady-state current during initialization or writes. When these events overlap, power rails experience voltage droop, regulator saturation, sequencing violations, ground bounce, transient instability, and cross-domain coupling.
The failure often appears somewhere completely unrelated to the real source. A sensor timeout may actually be caused by a collapsing 1.8V rail. A random reset may originate from an overloaded 3.3V regulator shared with a radio subsystem. A corrupted frame may begin with transient clock instability caused by simultaneous rail activation. The hardest part is that these failures are often intermittent.
Why concurrent activation becomes dangerous
Subsystems rarely behave linearly during startup. Steady-state current numbers from datasheets are usually misleading because startup phases behave differently from normal operation. A wireless module that averages 150mA may briefly exceed several hundred milliamps during RF calibration. A camera sensor may consume little power during streaming but create large transient demands during PLL locking and analog bias startup. An IR illumination circuit may produce aggressive current spikes that propagate into nearby rails.
Now imagine these events occurring together. The issue is not merely "high current." The issue is synchronized transient demand. In compact embedded systems, many regulators share upstream sources, planes, connectors, return paths, or battery impedance. Even if downstream rails are isolated logically, the upstream delivery network often becomes the shared bottleneck. This creates hidden coupling between unrelated features, the camera doesn't directly interfere with WiFi, but both may stress the same upstream 5V source, or share ground return impedance, or trigger simultaneous PMIC load transitions. The interaction happens electrically before firmware even understands it.
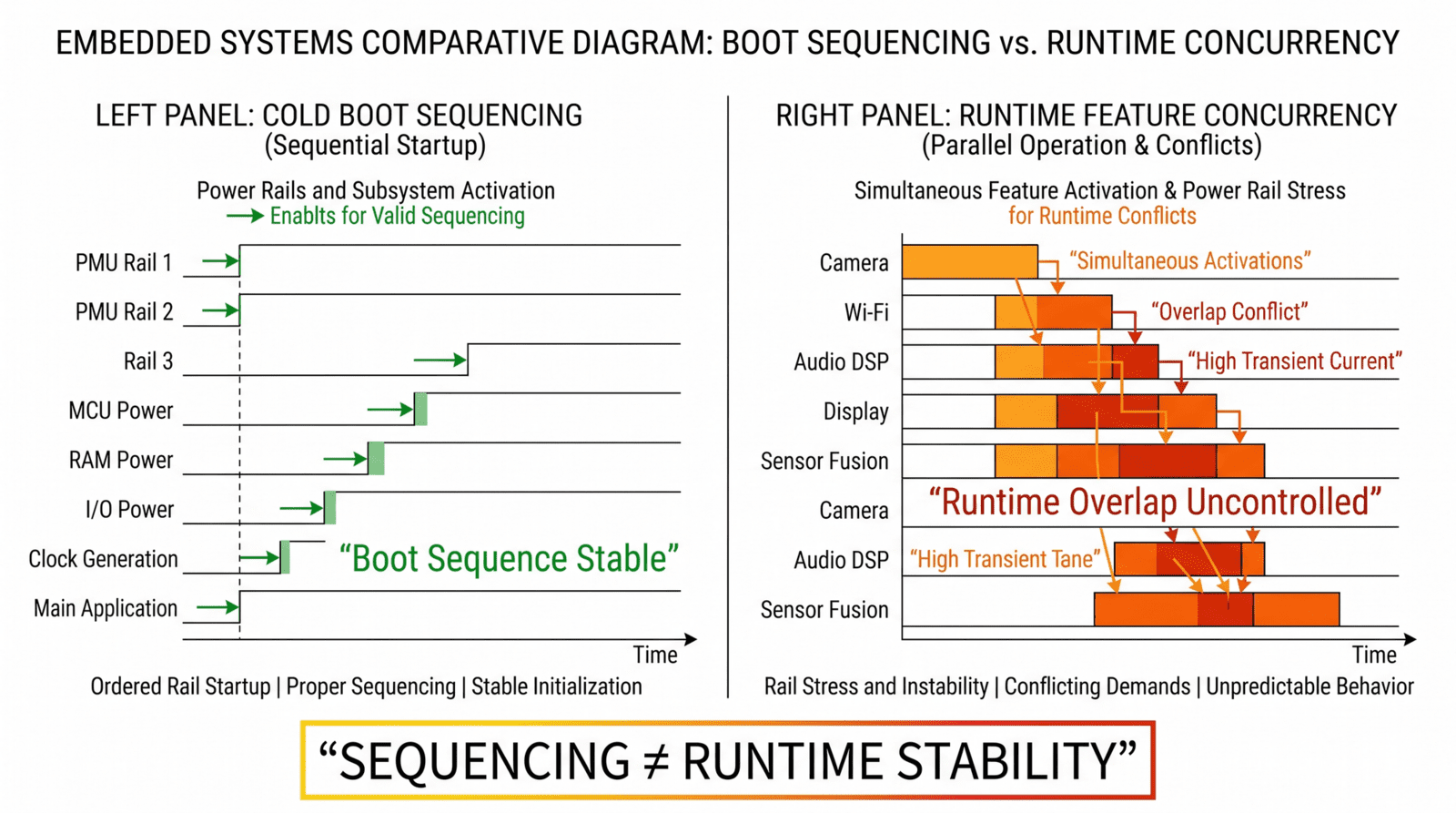
Power sequencing alone is not enough
Many systems implement rail sequencing correctly and still fail during runtime, because startup sequencing solves only initial ordering, not dynamic concurrency. A system may correctly power 3.3V, then 1.8V, then 1.2V, then release sensor reset. But later, during operation, WiFi wakes, image capture begins, IR LEDs turn on, storage writes start, and CPU load spikes simultaneously.
Now the runtime load profile no longer resembles the carefully validated power-up sequence. This is where many embedded systems become unpredictable. Good sequencing ensures devices start correctly. Good power architecture ensures they continue operating correctly during real feature overlap. These are different problems.
The importance of feature power budgeting
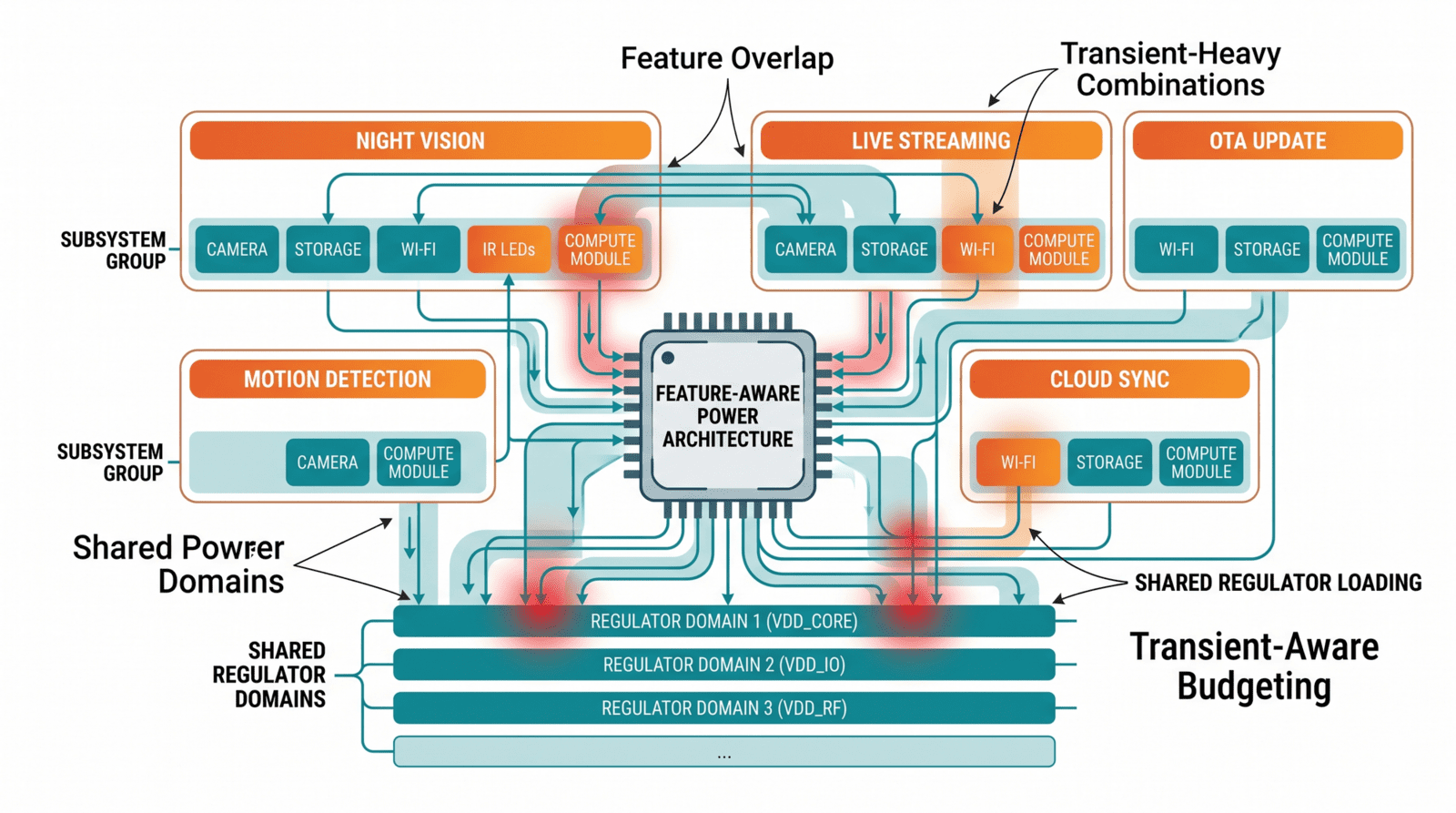
Traditional power budgeting often focuses on total current capacity. A more practical approach is feature-oriented budgeting. Instead of asking "how much current does the system consume?", ask "what combinations of features can activate simultaneously?" For example:
- Night Vision activates IR LEDs
- Camera
- ISP together
Cloud Sync activates WiFi and Storage together. Motion Detection activates Sensor, MCU, and Memory together. Live Streaming activates Camera, Compute, and Wireless together. OTA Update activates Compute, Storage, and Networking together.
Now the power architecture can be analyzed around realistic runtime behavior instead of isolated components. This changes design decisions significantly, helping identify overlapping peak conditions, shared regulator stress, simultaneous wake events, thermal concentration points, and transient-heavy operating modes. The system becomes behavior-aware instead of component-aware.
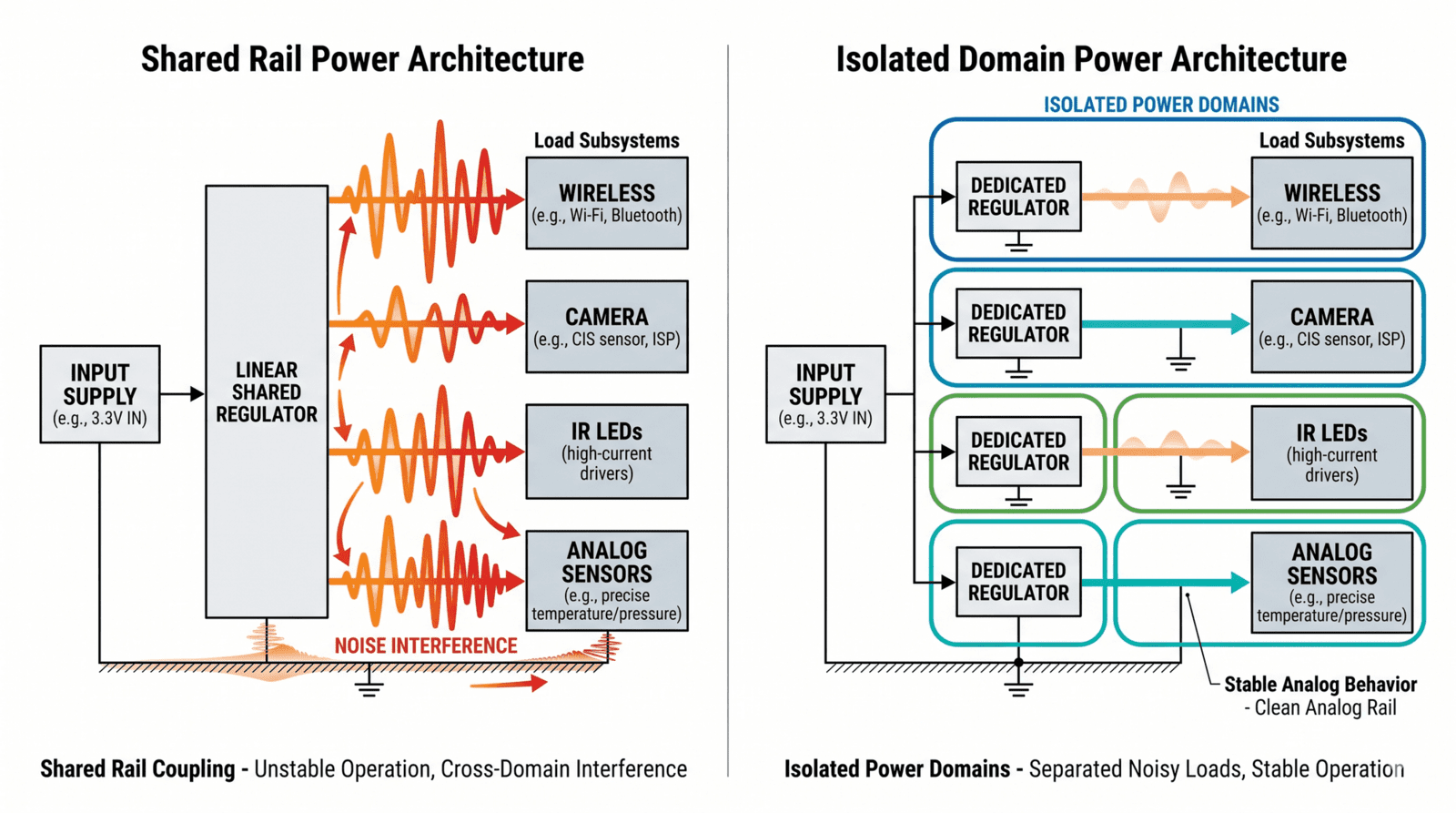
Rail isolation matters more than capacity
One oversized regulator doesn't automatically create a stable system, in fact large shared rails often worsen subsystem coupling. A better architecture isolates noisy or burst-heavy domains, wireless, illumination, motor drivers, storage, or high-speed compute blocks, from sensitive domains like sensors, clocking, analogue references, and precision ADC paths, which should avoid sharing transient-heavy power behavior.
In imaging systems this becomes extremely important. An IR LED pulse may slightly disturb analogue imaging rails, and the disturbance may not fully reset the sensor. Instead it creates noise, unstable exposure behavior, corrupted frames, or intermittent sensor communication issues. These failures are difficult because they appear functional most of the time. Isolation is often the difference between "works in lab" and "works reliably in production."
Coordinated feature enablement
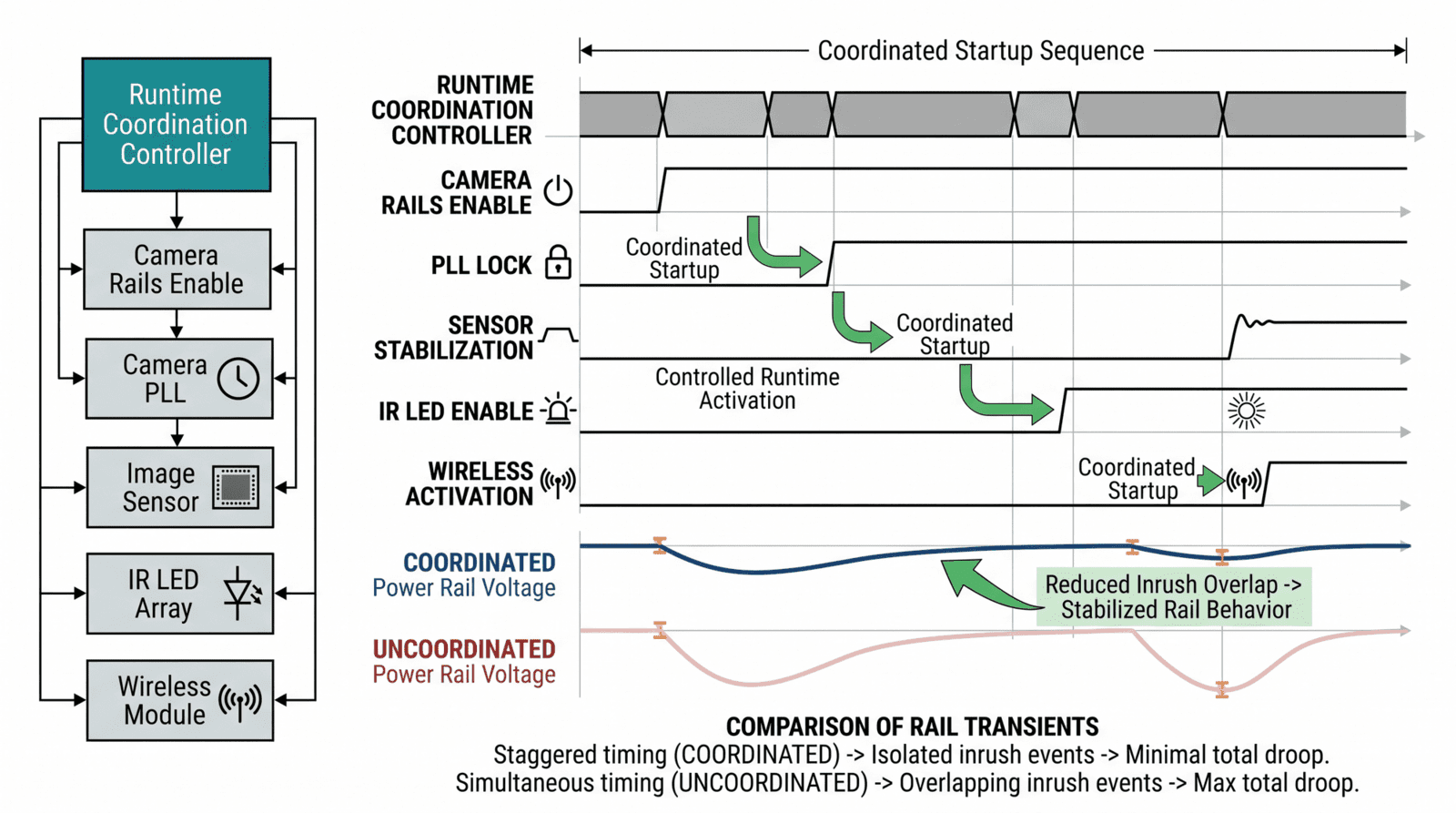
Firmware also plays a major role in power stability. One of the simplest ways to improve reliability is to prevent uncontrolled simultaneous activation, staggering feature startup, serializing high-current initialization phases, and coordinating feature activation timing. For example: enable camera rails first, wait for PLL lock, then enable IR illumination, then activate wireless transmission.
Even delays of a few milliseconds can dramatically reduce transient overlap. This isn't "slowing the system down," it's shaping the electrical behavior of the platform. Many stable embedded systems succeed because their firmware understands hardware timing constraints. The best firmware teams don't treat power as an infinite resource, they treat it as a shared system contract.
Wake events must also be coordinated
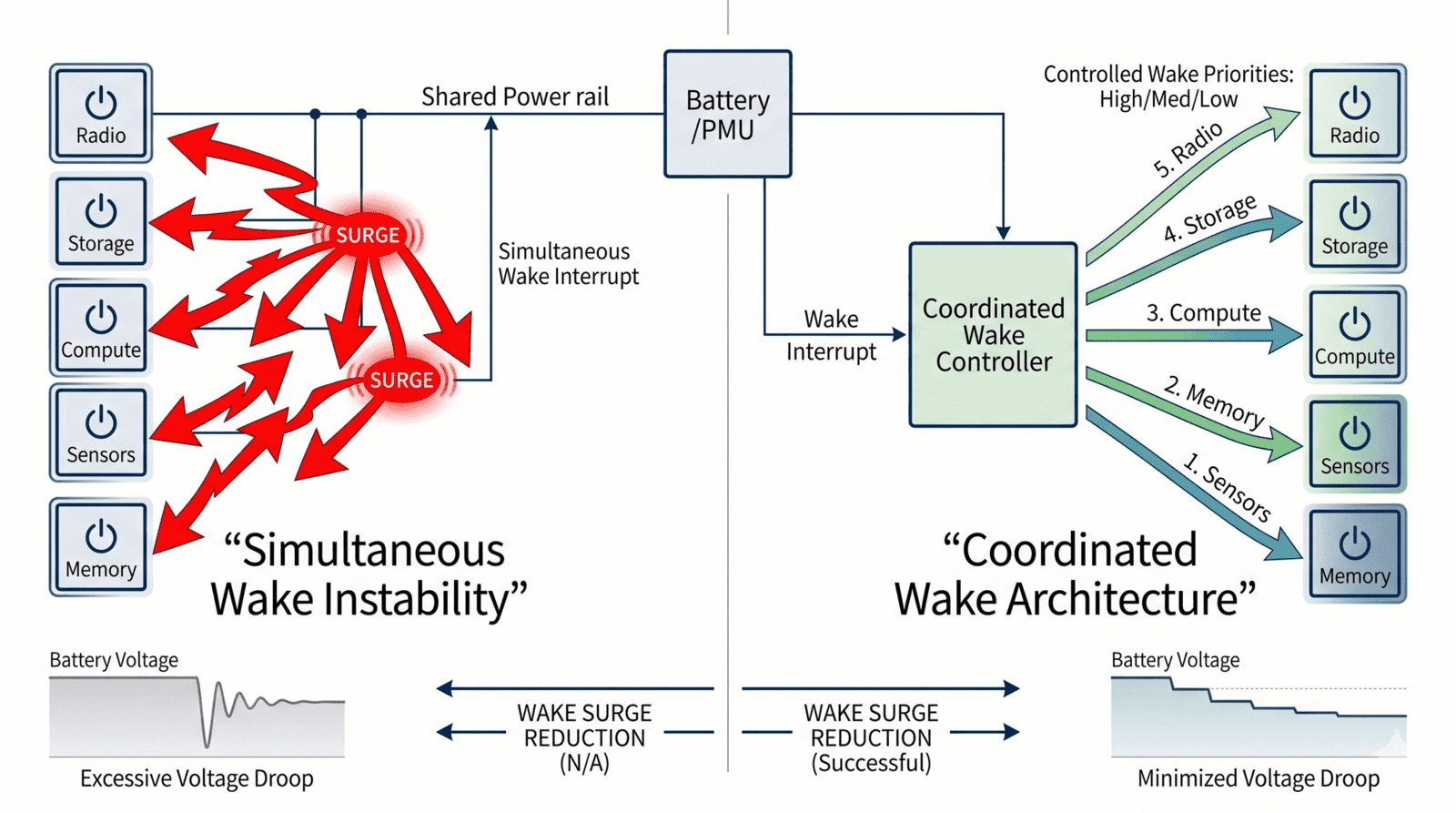
Sleep-to-active transitions are often more dangerous than cold boot. During wake, multiple clocks restart, memory domains reactivate, radios recalibrate, peripherals restore state, and interrupts begin firing simultaneously. If wake architecture is uncontrolled, transient demand becomes chaotic.
This is especially problematic in battery-powered systems because battery impedance rises with age, voltage droop increases under pulse loads, and regulator margins shrink at lower charge levels. A system that works perfectly at full battery may fail unpredictably at lower states of charge simply because wake concurrency changed the available margin. Reliable systems coordinate wake priorities carefully:
- Critical subsystems activate first
- Nonessential features wait
- Burst-heavy domains activate only after rails stabilize
This creates deterministic wake behavior instead of electrical chaos.
Brownouts are often symptom amplifiers
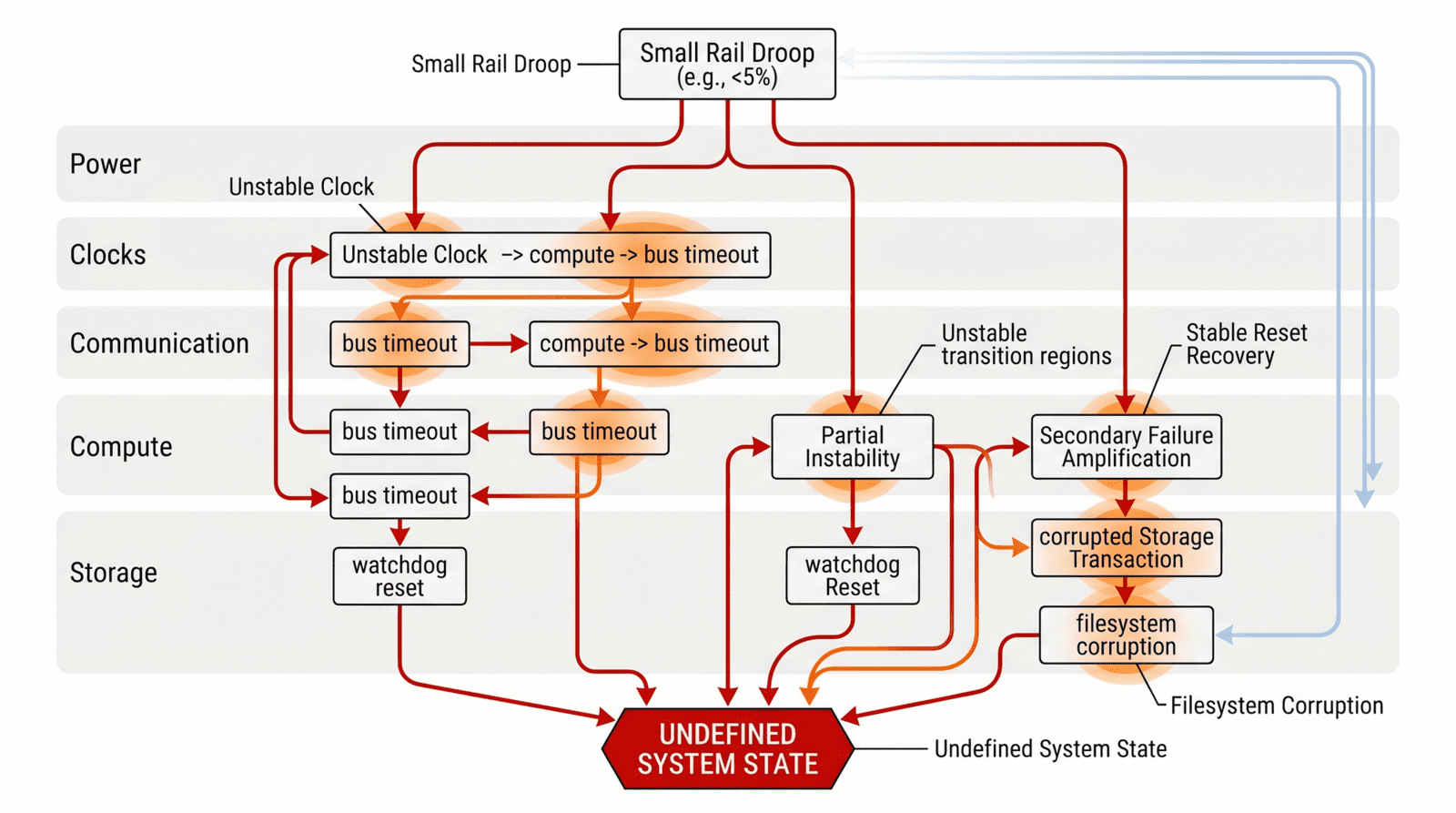
One of the most dangerous failure patterns is partial instability. Complete power failure is obvious. Partial instability is much harder, for example the CPU survives but the sensor resets, storage survives but bus timing shifts, wireless survives but clock synchronization fails.
Now the system enters undefined states. Software engineers may debug communication stacks for weeks while the actual issue is a 40mV transient on a shared rail. Brownouts frequently amplify secondary failures: corrupted transactions, peripheral lockups, invalid initialization states, watchdog resets, filesystem damage, or sensor desynchronization. The reset itself isn't the failure, the unstable intermediate region is. This is why stable rail behavior during feature overlap matters more than simply "avoiding shutdown."
Observability changes everything
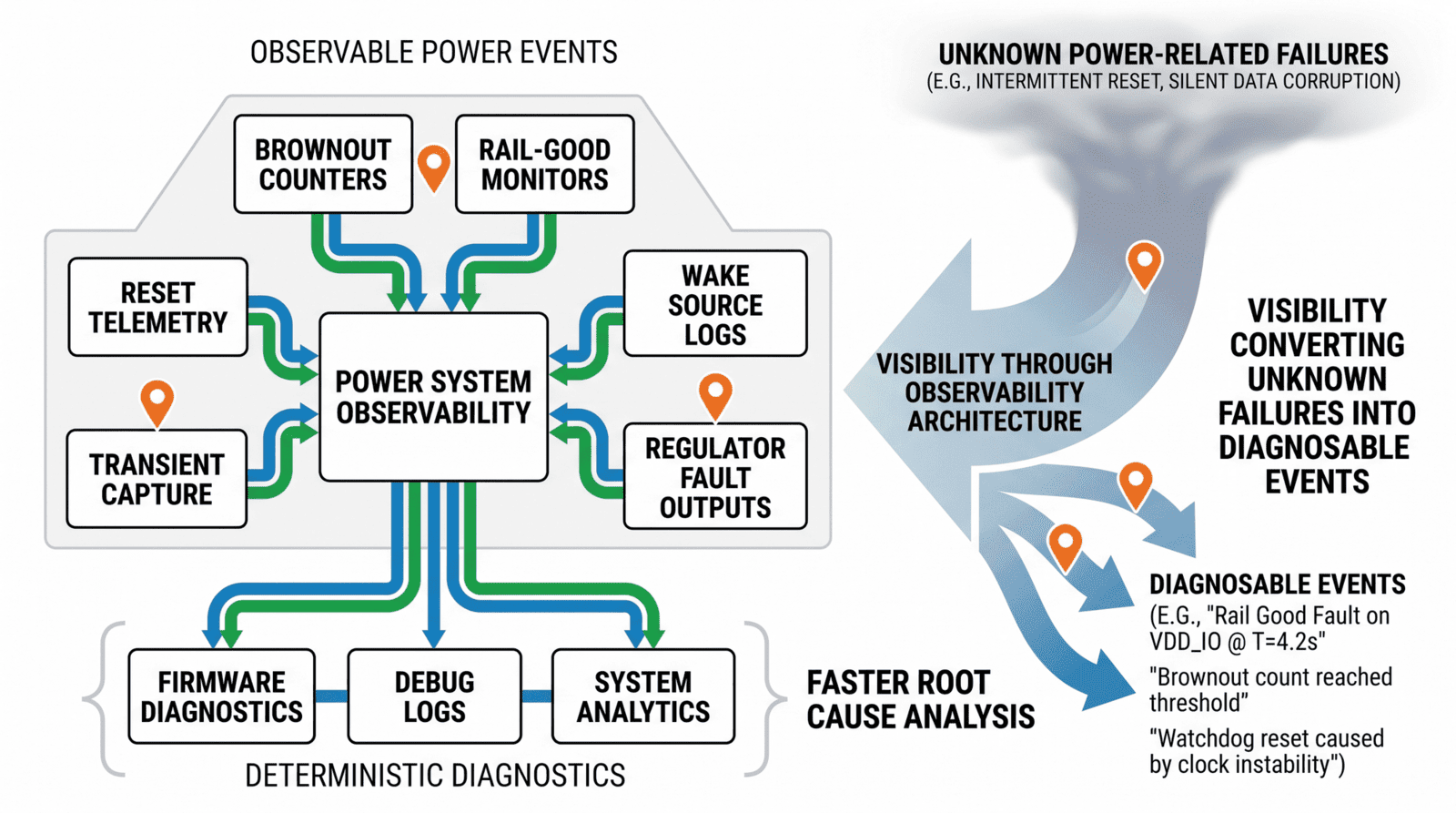
The most robust embedded systems expose power behavior visibly, not necessarily to the user, but to engineers. Useful observability includes rail-good monitoring, regulator fault outputs, brownout counters, wake source logging, transient event capture, and startup timing telemetry.
Without observability, concurrency failures become guesswork. With observability, patterns emerge quickly, failures happen during simultaneous camera plus WiFi activation, resets occur only during low battery conditions, specific rails collapse during IR pulses, or wake instability correlates with storage activity. The system begins explaining its own electrical behavior, which dramatically accelerates bring-up and field diagnostics.
Designing for worst-case feature overlap
Most products are tested in ideal operating modes. Real systems operate differently, users trigger unpredictable combinations, wireless reconnect during image capture, OTA updates during charging, sensor wake during low battery, or thermal capture while storage synchronization occurs.
Good power architecture assumes overlap will happen, not because it's intended, but because complex systems inevitably create unexpected concurrency. A robust design therefore validates simultaneous feature activation, peak transient overlap, low battery conditions, worst-case thermal behavior, degraded regulator conditions, and repeated wake cycles. This is where reliable products separate themselves from unstable ones.
Final thoughts
Power architecture is no longer only about voltage regulators and current calculations, it's about system behavior. As embedded devices become increasingly feature-dense, the real challenge becomes managing interactions between subsystems competing for shared electrical resources at the same moment. The failures rarely appear during isolated testing, they appear during overlap.
That's why modern embedded design requires coordinated activation, transient-aware architecture, rail isolation, wake orchestration, feature-aware budgeting, and runtime observability. A stable embedded system is not one where every feature works individually, it's one where all features can coexist electrically without destabilizing the platform around them. That's where real power architecture begins.