Firmware
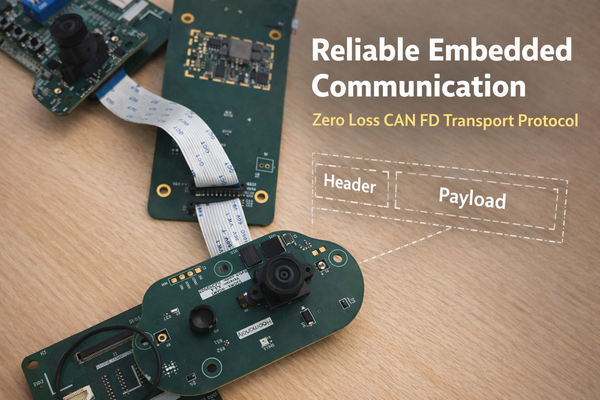
Designing a Reliable Stop-and-Wait Transport Protocol on CAN FD for Deterministic Embedded Systems
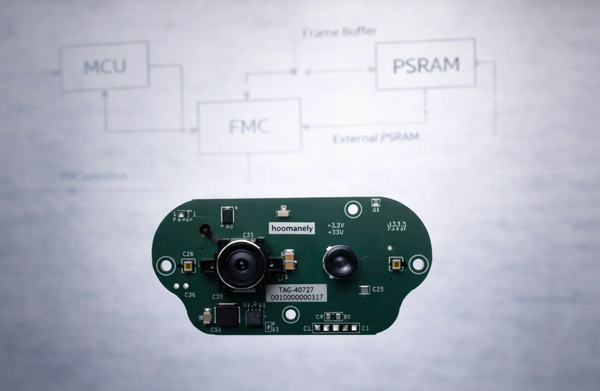
In high-performance embedded systems, data integrity and deterministic timing are paramount. Controller Area Network (CAN) has long been the standard for reliable automotive and industrial communication. With the transition to CAN FD (Flexible Data-rate), we gained higher bandwidth and larger payloads. However, standard CAN FD, while robust for short control